
















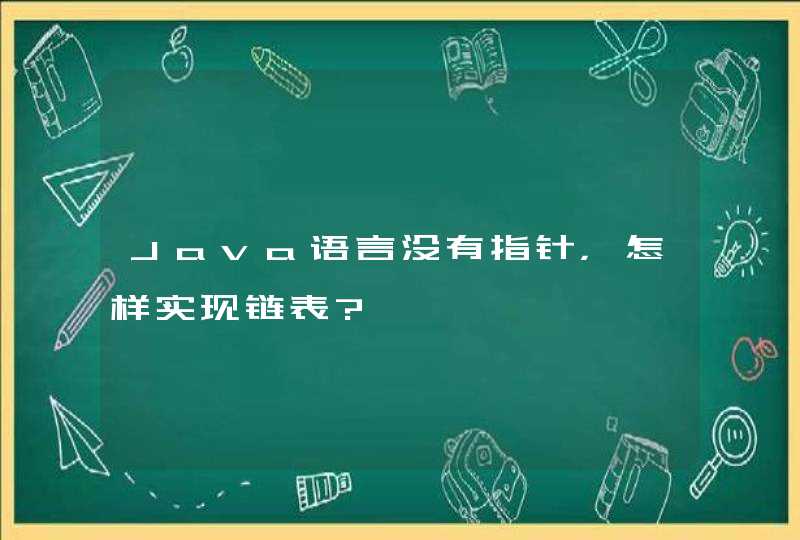

--梯度,第1张")
对边缘信息与背景差异较大的场景,你也可以使用threshold分割,不过若阈值不好选取,Laplacian梯度算子就不失为一直尝试方案,而且上网看看,关于Laplacian算子还可以用来判断图像的模糊程度,这个在相机的自动对焦当中,是否可以尝试判断下?
不过处理的效果并不理想,图像低灰阶部分边缘信息丢失严重。
对于sobel,laplacian算子我们可以使用cv2.filter2D()来实现,配置相应的核模板即可,如实现提取水平方向边缘信息:
你可以依据实际的应用需求来配置提取边缘的角度信息,这里以45度角(垂直向下逆时针旋转45度)为例:
对此,你可以采用下面的方式来解决:
常用形式odeint(func, y0, t,args,Dfun)
一般这种形式就够用了。
下面是官方的例子,求解的是
D(D(y1))-t*y1=0
为了方便,采取D=d/dt。如果我们令初值
y1(0) = 1.0/3**(2.0/3.0)/gamma(2.0/3.0)
D(y1)(0) = -1.0/3**(1.0/3.0)/gamma(1.0/3.0)
这个微分方程的解y1=airy(t)。
令D(y1)=y0,就有这个常微分方程组。
D(y0)=t*y1
D(y1)=y0
Python求解该微分方程。
>>>from scipy.integrate import odeint
>>>from scipy.special import gamma, airy
>>>y1_0 = 1.0/3**(2.0/3.0)/gamma(2.0/3.0)
>>>y0_0 = -1.0/3**(1.0/3.0)/gamma(1.0/3.0)
>>>y0 = [y0_0, y1_0]
>>>def func(y, t):
... return [t*y[1],y[0]]
>>>def gradient(y,t):
... return [[0,t],[1,0]]
>>>x = arange(0,4.0, 0.01)
>>>t = x
>>>ychk = airy(x)[0]
>>>y = odeint(func, y0, t)
>>>y2 = odeint(func, y0, t, Dfun=gradient)
>>>print ychk[:36:6]
[ 0.355028 0.339511 0.324068 0.308763 0.293658 0.278806]
>>>print y[:36:6,1]
[ 0.355028 0.339511 0.324067 0.308763 0.293658 0.278806]
>>>print y2[:36:6,1]
[ 0.355028 0.339511 0.324067 0.308763 0.293658 0.278806]
得到的解与精确值相比,误差相当小。
=======================================================================================================
args是额外的参数。
用法请参看下面的例子。这是一个洛仑兹曲线的求解,并且用matplotlib绘出空间曲线图。(来自《python科学计算》)
from scipy.integrate import odeint
import numpy as np
def lorenz(w, t, p, r, b):
# 给出位置矢量w,和三个参数p, r, b 计算出
# dx/dt, dy/dt, dz/dt 的值
x, y, z = w
# 直接与lorenz 的计算公式对应
return np.array([p*(y-x), x*(r-z)-y, x*y-b*z])
t = np.arange(0, 30, 0.01) # 创建时间点
# 调用ode 对lorenz 进行求解, 用两个不同的初始值
track1 = odeint(lorenz, (0.0, 1.00, 0.0), t, args=(10.0, 28.0, 3.0))
track2 = odeint(lorenz, (0.0, 1.01, 0.0), t, args=(10.0, 28.0, 3.0))
# 绘图
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.pyplot as plt
fig = plt.figure()
ax = Axes3D(fig)
ax.plot(track1[:,0], track1[:,1], track1[:,2])
ax.plot(track2[:,0], track2[:,1], track2[:,2])
plt.show()
===========================================================================
scipy.integrate.odeint(func, y0, t, args=(), Dfun=None, col_deriv=0, full_output=0, ml=None, mu=None, rtol=None, atol=None, tcrit=None, h0=0.0, hmax=0.0, hmin=0.0, ixpr=0, mxstep=0, mxhnil=0, mxordn=12, mxords=5, printmessg=0)
计算常微分方程(组)
使用 FORTRAN库odepack中的lsoda解常微分方程。这个函数一般求解初值问题。
参数:
func : callable(y, t0, ...)计算y在t0 处的导数。
y0 : 数组y的初值条件(可以是矢量)
t : 数组为求出y,这是一个时间点的序列。初值点应该是这个序列的第一个元素。
args : 元组func的额外参数
Dfun : callable(y, t0, ...)函数的梯度(Jacobian)。即雅可比多项式。
col_deriv : boolean.True,Dfun定义列向导数(更快),否则Dfun会定义横排导数
full_output : boolean可选输出,如果为True 则返回一个字典,作为第二输出。
printmessg : boolean是否打印convergence 消息。
返回: y : array, shape (len(y0), len(t))
数组,包含y值,每一个对应于时间序列中的t。初值y0 在第一排。
infodict : 字典,只有full_output == True 时,才会返回。
字典包含额为的输出信息。
键值:
‘hu’ vector of step sizes successfully used for each time step.
‘tcur’ vector with the value of t reached for each time step. (will always be at least as large as the input times).
‘tolsf’ vector of tolerance scale factors, greater than 1.0, computed when a request for too much accuracy was detected.
‘tsw’ value of t at the time of the last method switch (given for each time step)
‘nst’ cumulative number of time steps
‘nfe’ cumulative number of function evaluations for each time step
‘nje’ cumulative number of jacobian evaluations for each time step
‘nqu’ a vector of method orders for each successful step.
‘imxer’index of the component of largest magnitude in the weighted local error vector (e / ewt) on an error return, -1 otherwise.
‘lenrw’ the length of the double work array required.
‘leniw’ the length of integer work array required.
‘mused’a vector of method indicators for each successful time step: 1: adams (nonstiff), 2: bdf (stiff)
其他参数,官方网站和文档都没有明确说明。相关的资料,暂时也找不到。