












简单来说, SetMaxHeap 提供了一种可以设置固定触发阈值的 GC (Garbage Collection垃圾回收)方式
官方源码链接 https://go-review.googlesource.com/c/go/+/227767/3
大量临时对象分配导致的 GC 触发频率过高, GC 后实际存活的对象较少,
或者机器内存较充足,希望使用剩余内存,降低 GC 频率的场景
GC 会 STW ( Stop The World ),对于时延敏感场景,在一个周期内连续触发两轮 GC ,那么 STW 和 GC 占用的 CPU 资源都会造成很大的影响, SetMaxHeap 并不一定是完美的,在某些场景下做了些权衡,官方也在进行相关的实验,当前方案仍没有合入主版本。
先看下如果没有 SetMaxHeap ,对于如上所述的场景的解决方案
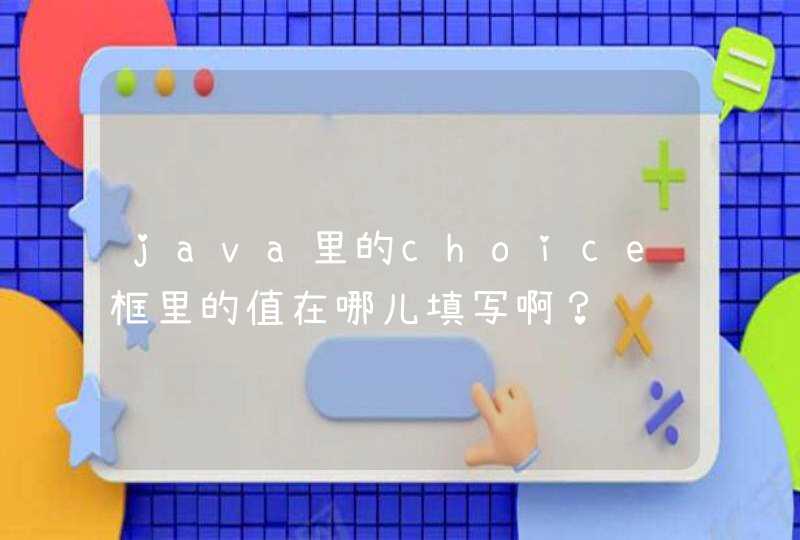
这里简单说下 GC 的几个值的含义,可通过 GODEBUG=gctrace=1 获得如下数据
这里只关注 128->132->67 MB 135 MB goal ,
分别为 GC开始时内存使用量 ->GC标记完成时内存使用量 ->GC标记完成时的存活内存量 本轮GC标记完成时的 预期 内存使用量(上一轮 GC 完成时确定)
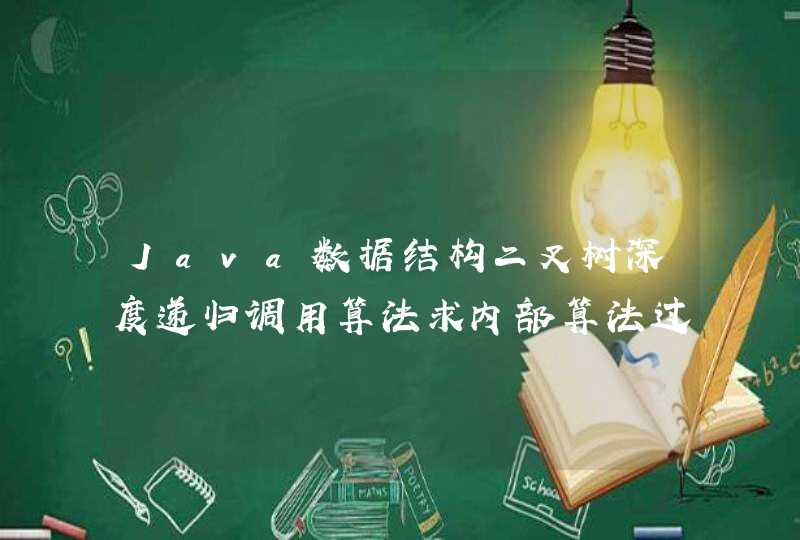
引用 GC peace设计文档 中的一张图来说明
对应关系如下:
简单说下 GC pacing (信用机制)
GC pacing 有两个目标,
那么当一轮 GC 完成时,如何只根据本轮 GC 存活量去实现这两个小目标呢?
这里实际是根据当前的一些数据或状态去 预估 “未来”,所有会存在些误差
首先确定 gc Goalgoal = memstats.heap_marked + memstats.heap_marked*uint64(gcpercent)/100
heap_marked 为本轮 GC 存活量, gcpercent 默认为 100 ,可以通过环境变量 GOGC=100 或者 debug.SetGCPercent(100) 来设置
那么默认情况下 goal = 2 * heap_marked
gc_trigger 是与 goal 相关的一个值( gc_trigger 大约为 goal 的 90% 左右),每轮 GC 标记完成时,会根据 |Ha-Hg| 和实际使用的 cpu 资源 动态调整 gc_trigger 与 goal 的差值
goal 与 gc_trigger 的差值即为,为 GC 期间分配的对象所预留的空间
GC pacing 还会预估下一轮 GC 发生时,需要扫描对象对象的总量,进而换算为下一轮 GC 所需的工作量,进而计算出 mark assist 的值
本轮 GC 触发( gc_trigger ),到本轮的 goal 期间,需要尽力完成 GC mark 标记操作,所以当 GC 期间,某个 goroutine 分配大量内存时,就会被拉去做 mark assist 工作,先进行 GC mark 标记赚取足够的信用值后,才能分配对应大小的对象
根据本轮 GC 存活的内存量( heap_marked )和下一轮 GC 触发的阈值( gc_trigger )计算 sweep assist 的值,本轮 GC 完成,到下一轮 GC 触发( gc_trigger )时,需要尽力完成 sweep 清扫操作
预估下一轮 GC 所需的工作量的方式如下:
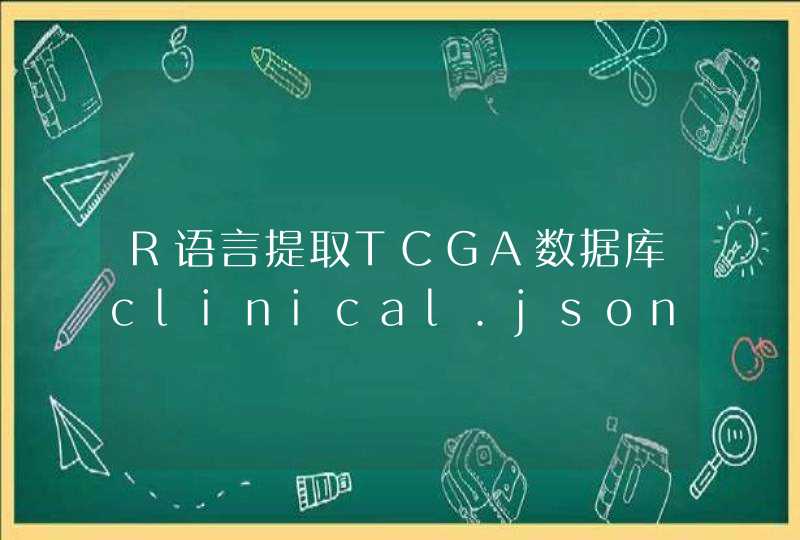
继续分析文章开头的问题,如何充分利用剩余内存,降低 GC 频率和 GC 对 CPU 的资源消耗
如上图可以看出, GC 后,存活的对象为 2GB 左右,如果将 gcpercent 设置为 400 ,那么就可以将下一轮 GC 触发阈值提升到 10GB 左右
前面一轮看起来很好,提升了 GC 触发的阈值到 10GB ,但是如果某一轮 GC 后的存活对象到达 2.5GB 的时候,那么下一轮 GC 触发的阈值,将会超过内存阈值,造成 OOM ( Out of Memory ),进而导致程序崩溃。
可以通过 GOGC=off 或者 debug.SetGCPercent(-1) 来关闭 GC
可以通过进程外监控内存使用状态,使用信号触发的方式通知程序,或 ReadMemStats 、或 linkname runtime.heapRetained 等方式进行堆内存使用的监测
可以通过调用 runtime.GC() 或者 debug.FreeOSMemory() 来手动进行 GC 。
这里还需要说几个事情来解释这个方案所存在的问题
通过 GOGC=off 或者 debug.SetGCPercent(-1) 是如何关闭 GC 的?
gc 4 @1.006s 0%: 0.033+5.6+0.024 ms clock, 0.27+4.4/11/25+0.19 ms cpu, 428->428->16 MB, 17592186044415 MB goal, 8 P (forced)
通过 GC trace 可以看出,上面所说的 goal 变成了一个很诡异的值 17592186044415
实际上关闭 GC 后, Go 会将 goal 设置为一个极大值 ^uint64(0) ,那么对应的 GC 触发阈值也被调成了一个极大值,这种处理方式看起来也没什么问题,将阈值调大,预期永远不会再触发 GC
那么如果在关闭 GC 的情况下,手动调用 runtime.GC() 会导致什么呢?
由于 goal 和 gc_trigger 被设置成了极大值, mark assist 和 sweep assist 也会按照这个错误的值去计算,导致工作量预估错误,这一点可以从 trace 中进行证明
可以看到很诡异的 trace 图,这里不做深究,该方案与 GC pacing 信用机制不兼容
记住,不要在关闭 GC 的情况下手动触发 GC ,至少在当前 Go1.14 版本中仍存在这个问题
SetMaxHeap 的实现原理,简单来说是强行控制了 goal 的值
注: SetMaxHeap ,本质上是一个软限制,并不能解决 极端场景 下的 OOM ,可以配合内存监控和 debug.FreeOSMemory() 使用
SetMaxHeap 控制的是堆内存大小, Go 中除了堆内存还分配了如下内存,所以实际使用过程中,与实际硬件内存阈值之间需要留有一部分余量。
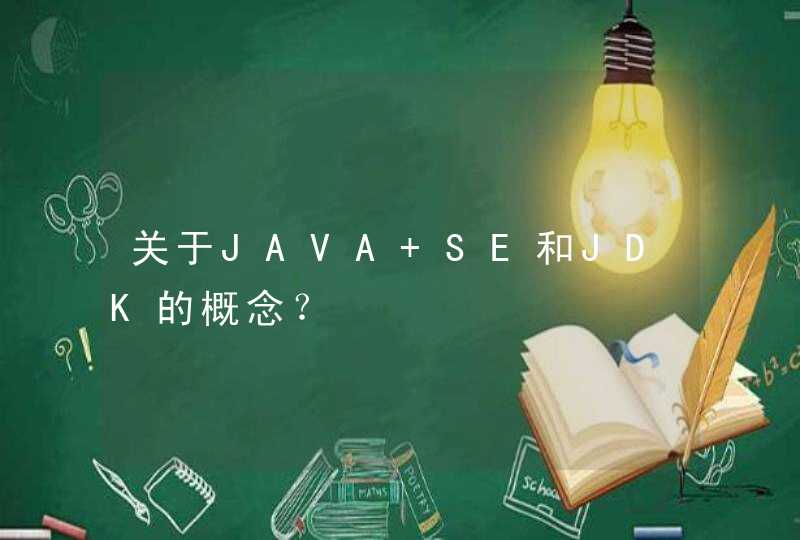
对于文章开始所述问题,使用 SetMaxHeap 后,预期的 GC 过程大概是这个样子
简单用法1
该方法简单粗暴,直接将 goal 设置为了固定值
注:通过上文所讲,触发 GC 实际上是 gc_trigger ,所以当阈值设置为 12GB 时,会提前一点触发 GC ,这里为了描述方便,近似认为 gc_trigger=goal
简单用法2
当不关闭 GC 时, SetMaxHeap 的逻辑是, goal 仍按照 gcpercent 进行计算,当 goal 小于 SetMaxHeap 阈值时不进行处理;当 goal 大于 SetMaxHeap 阈值时,将 goal 限制为 SetMaxHeap 阈值
注:通过上文所讲,触发 GC 实际上是 gc_trigger ,所以当阈值设置为 12GB 时,会提前一点触发 GC ,这里为了描述方便,近似认为 gc_trigger=goal
切换到 go1.14 分支,作者选择了 git checkout go1.14.5
选择官方提供的 cherry-pick 方式(可能需要梯子,文件改动不多,我后面会列出具体改动)
git fetch "https://go.googlesource.com/go" refs/changes/67/227767/3 &&git cherry-pick FETCH_HEAD
需要重新编译Go源码
注意点:
下面源码中的官方注释说的比较清楚,在一些关键位置加入了中文注释
入参bytes为要设置的阈值
notify 简单理解为 GC 的策略 发生变化时会向 channel 发送通知,后续源码可以看出“策略”具体指哪些内容
返回值为本次设置之前的 MaxHeap 值
$GOROOT/src/runtime/debug/garbage.go
$GOROOT/src/runtime/mgc.go
注:作者尽量用通俗易懂的语言去解释 Go 的一些机制和 SetMaxHeap 功能,可能有些描述与实现细节不完全一致,如有错误还请指出
邮箱挂梯子教程如下步骤,1、使用西部世界:https://wwsj1783.xyz/i/win106/VE3P2U6
2、用邮箱注册登录后,挂梯,选择绕过大陆IP模式,就可以愉快地上年轮了。
1、将梯子放在墙边,让梯子的脚稳定固定在地上。
2、梯子与地面成75度角。要做到这一点,最简单的方法是用脚尖站立,触摸梯子的脚,双臂向前伸展。当你的手臂完全伸展时,手掌应该能到达梯子的横档。如果角度太陡,梯子可能尖向后;太浅,可能滑出或在中间弯曲。你可以通过拉梯脚离墙约?的阶梯总长度达到这一角。
3、确保梯子的脚是安全的。总是把梯子脚平行于墙壁和坚实的平地上。
4、确保梯子的顶部是安全的。两侧钢轨应均匀地支承并放置在平整的表面上。当你把重量放在梯子上时,梯子不应该滑动或晃动。
5、爬梯子保持三点接触。你应该一次只爬一个梯级,一次只移动一只手或一只脚。你需要总是面对你爬的梯子。
6、利用配件帮助稳定梯子的顶部。有各种各样的任务,需要一个梯子,和各种各样的梯子,可以帮助您更加轻松、安全地完成这些任务的顶级。软“手套”,在两边的扶手上滑可以提供额外的抓地力和保护表面免受伤害的阶梯。梯子稳定器基本上使梯子顶部的点扩大。这对于保护脆弱的壁板或清除窗户的宽度是有用的。当梯子靠在比梯子的宽度窄的表面上时,像电话杆一样,单支撑附件是必要的。他们爬到两条侧轨顶端的梯子上。
7、使用电时避免使用铝梯。铝梯往往是最轻的重量,但它们也是电导体。所以每当你需要把你的梯子附近的电源线或夹具,甚至工作绳电动工具移动时,最好使用木质或玻璃钢梯子,无论是电导体还是其他什么。即使你使用的是木制或玻璃钢梯子,尽量避免直接与任何电线接触。
8、经常检查梯子是否有损坏。检查所有活动部件,如脚和梯级锁,以及整体的梯子的完整性,可以防止最严重的事故。同样重要的是,梯子可以清除任何可能粘滑、粘性、腐蚀性、导电性或其他附加使用梯子的有害物质。
9、请参考梯子的安全标签。所有的梯子都有一个标签,标签在一个侧栏杆的外面,详细说明梯子的最大长度,工作职责(或最大重量),以及其他有用的安全信息。记住,最大重量包括你的身体、衣服、工具和附在梯子上的任何配件的重量。