














checkErr(err)
for rows.Next() {
var userId int
var userName string
var userAge int
var userSex int
rows.Columns()
err = rows.Scan(&userId, &userName, &userAge, &userSex)
checkErr(err)
fmt.Println(userId)
fmt.Println(userName)
fmt.Println(userAge)
fmt.Println(userSex)
}
从上一节的内容可知,Do() 和 Receive() 等方法的返回值,除了 error 外,是一个 interface{} 类型的返回值,因此当我们的复杂操作返回的不是基本数据类型时,就需要我们自己解析返回值,例如,当我们利用 HMGET 方法获取一批返回值时,就需要对返回结果进行解析,具体如下:
由于返回值是多条数据,因此需要先将 reply 转成 []interface 类型,然后在遍历结果时在分别转成 []uint8 (byte数组), 最后再转成 string 类型。
随着我们操作复杂度,数据解析的工作量也会非常大,(lua 脚本的使用,会使结果的解析更为复杂,因为可能存在多种类型的结果一起返回的情况,lua 脚本相关的内容会在下一节介绍)。
redigo 包中的返回值助手函数的存在,就是为了帮助我们完成这些枯燥繁琐的数据解析过程。
返回值助手函数相关源码路径为 github.com/gomodule/redigo/redis/reply.go 提供的主要方法如下:
上述返回值助手函数的具体使用,应该依据具体的命令进行选择。如果大家还记得上一节介绍的 Redis 基本数据类型,可能会有些疑问,对于 redis 来说,其数据据存储本质都是 []bytes, 为什么可以解析出 Int、int64、float等类型的数据呢?
我们以 Float64() 为例进行说明,具体源码如下:
其实,返回值助手函数是将 []byte 类型的原始数据,利用 strconv.ParseFloat(string(reply), 64) 转换成了 float64类型,因此在我们使用过程中返回值助手函数的选择,应该基于业务和实际存储的数据格式为依据。我们以第一小节的示例为例,看返回值助手函数如何降低我们的工作量,具体如下:
除了使用返回值助手函数对上述固定结构的结果进行解析外,redigo 包还提供了一个 Scan()函数用于解析自定义的复杂数据结构,我们依然以上一个示例进行说明,具体示例如下:
如果返回结果为结构化切片,也可以使用 canSlice() 方法,从而简化 loop 处理的部分,具体示例如下:
通过上述的示例,我们介绍了 scan 函数的基本用法,但是细心的同学可能会发现吗,为什么数据写入时,value 的类型为 []int64 但是读取时只能按照 string 类型读取呢。这是因为 Redis 底层存储的数据本质都是 string 类型,。 无论是 HMSET 还是 MSET 最终都只能按照 string 类型读取,因为其本质都是 hash 结构,不同之处仅在于 HMSET 是嵌套的 hash类型。 因此,[]int64 数据在写入阶段,就已经被自动处理为 []byte,写入 redis 之后,len 和 类型 属性会丢失。
如果强行按照 []int64解析将出错:
如果 value 必须以结构化的数据存储,那么可以提前对要写入的数据进行编码,例如 json、protobuf 等,取出后再进行解码获得原始数据。
编写过C语言程序的肯定知道通过malloc()方法动态申请内存,其中内存分配器使用的是glibc提供的ptmalloc2。 除了glibc,业界比较出名的内存分配器有Google的tcmalloc和Facebook的jemalloc。二者在避免内存碎片和性能上均比glic有比较大的优势,在多线程环境中效果更明显。Golang中也实现了内存分配器,原理与tcmalloc类似,简单的说就是维护一块大的全局内存,每个线程(Golang中为P)维护一块小的私有内存,私有内存不足再从全局申请。另外,内存分配与GC(垃圾回收)关系密切,所以了解GC前有必要了解内存分配的原理。
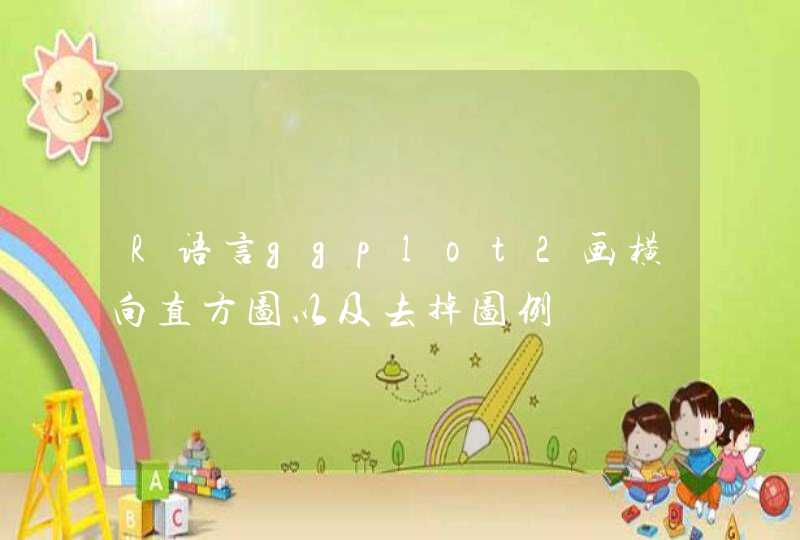
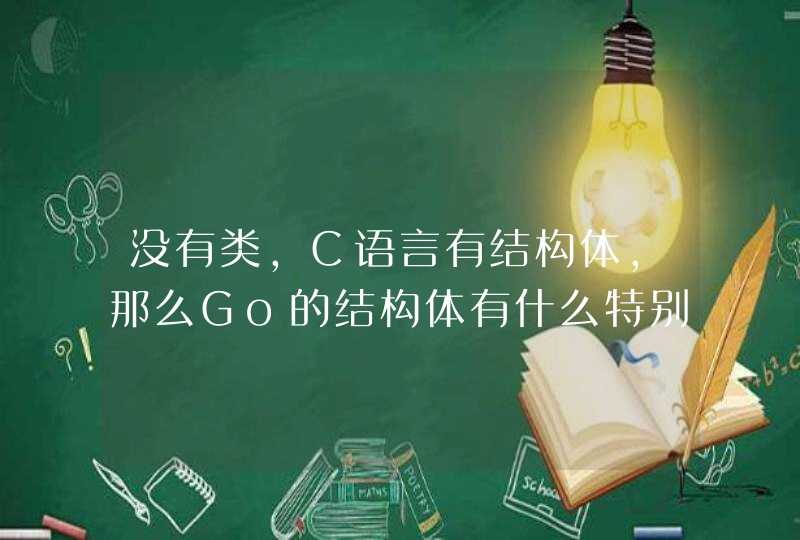
为了方便自主管理内存,做法便是先向系统申请一块内存,然后将内存切割成小块,通过一定的内存分配算法管理内存。 以64位系统为例,Golang程序启动时会向系统申请的内存如下图所示:
预申请的内存划分为spans、bitmap、arena三部分。其中arena即为所谓的堆区,应用中需要的内存从这里分配。其中spans和bitmap是为了管理arena区而存在的。
arena的大小为512G,为了方便管理把arena区域划分成一个个的page,每个page为8KB,一共有512GB/8KB个页;
spans区域存放span的指针,每个指针对应一个page,所以span区域的大小为(512GB/8KB)乘以指针大小8byte = 512M
bitmap区域大小也是通过arena计算出来,不过主要用于GC。
span是用于管理arena页的关键数据结构,每个span中包含1个或多个连续页,为了满足小对象分配,span中的一页会划分更小的粒度,而对于大对象比如超过页大小,则通过多页实现。
根据对象大小,划分了一系列class,每个class都代表一个固定大小的对象,以及每个span的大小。如下表所示:
上表中每列含义如下:
class: class ID,每个span结构中都有一个class ID, 表示该span可处理的对象类型
bytes/obj:该class代表对象的字节数
bytes/span:每个span占用堆的字节数,也即页数乘以页大小
objects: 每个span可分配的对象个数,也即(bytes/spans)/(bytes/obj)waste
bytes: 每个span产生的内存碎片,也即(bytes/spans)%(bytes/obj)上表可见最大的对象是32K大小,超过32K大小的由特殊的class表示,该class ID为0,每个class只包含一个对象。
span是内存管理的基本单位,每个span用于管理特定的class对象, 跟据对象大小,span将一个或多个页拆分成多个块进行管理。src/runtime/mheap.go:mspan定义了其数据结构:
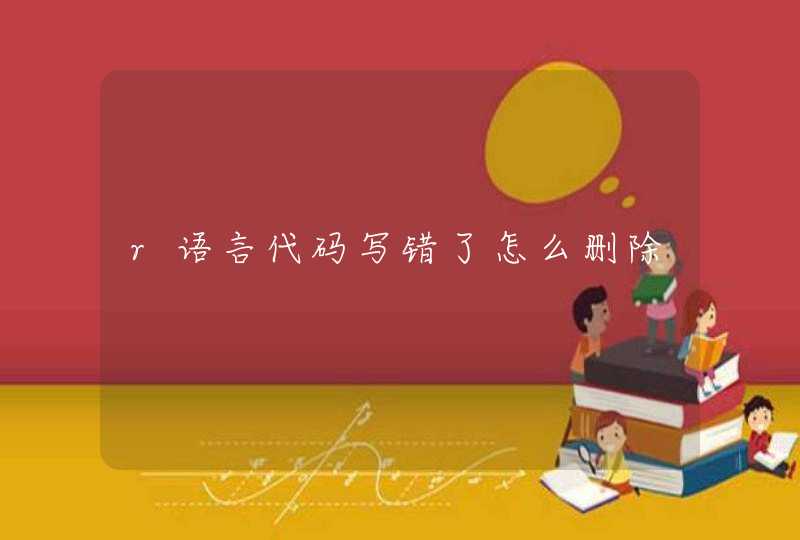
以class 10为例,span和管理的内存如下图所示:
spanclass为10,参照class表可得出npages=1,nelems=56,elemsize为144。其中startAddr是在span初始化时就指定了某个页的地址。allocBits指向一个位图,每位代表一个块是否被分配,本例中有两个块已经被分配,其allocCount也为2。next和prev用于将多个span链接起来,这有利于管理多个span,接下来会进行说明。
有了管理内存的基本单位span,还要有个数据结构来管理span,这个数据结构叫mcentral,各线程需要内存时从mcentral管理的span中申请内存,为了避免多线程申请内存时不断的加锁,Golang为每个线程分配了span的缓存,这个缓存即是cache。src/runtime/mcache.go:mcache定义了cache的数据结构
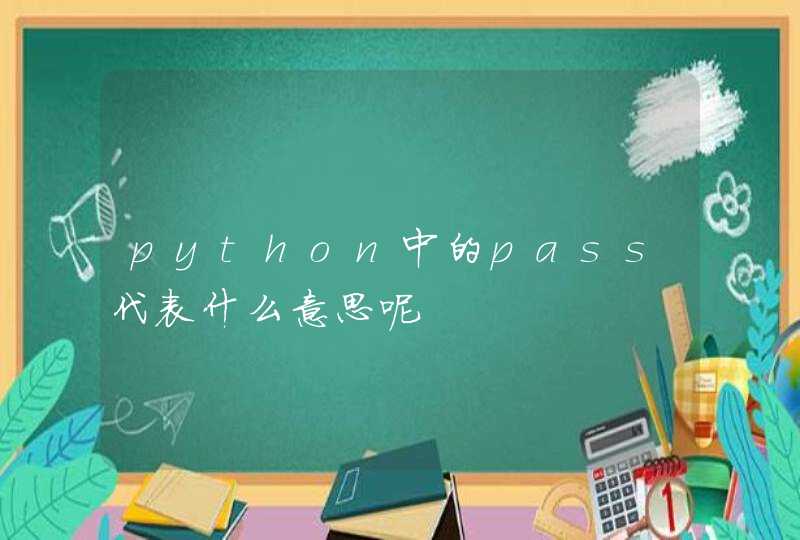
alloc为mspan的指针数组,数组大小为class总数的2倍。数组中每个元素代表了一种class类型的span列表,每种class类型都有两组span列表,第一组列表中所表示的对象中包含了指针,第二组列表中所表示的对象不含有指针,这么做是为了提高GC扫描性能,对于不包含指针的span列表,没必要去扫描。根据对象是否包含指针,将对象分为noscan和scan两类,其中noscan代表没有指针,而scan则代表有指针,需要GC进行扫描。mcache和span的对应关系如下图所示:
mchache在初始化时是没有任何span的,在使用过程中会动态的从central中获取并缓存下来,跟据使用情况,每种class的span个数也不相同。上图所示,class 0的span数比class1的要多,说明本线程中分配的小对象要多一些。
cache作为线程的私有资源为单个线程服务,而central则是全局资源,为多个线程服务,当某个线程内存不足时会向central申请,当某个线程释放内存时又会回收进central。src/runtime/mcentral.go:mcentral定义了central数据结构:
lock: 线程间互斥锁,防止多线程读写冲突
spanclass : 每个mcentral管理着一组有相同class的span列表
nonempty: 指还有内存可用的span列表
empty: 指没有内存可用的span列表
nmalloc: 指累计分配的对象个数线程从central获取span步骤如下:
将span归还步骤如下:
从mcentral数据结构可见,每个mcentral对象只管理特定的class规格的span。事实上每种class都会对应一个mcentral,这个mcentral的集合存放于mheap数据结构中。src/runtime/mheap.go:mheap定义了heap的数据结构:
lock: 互斥锁
spans: 指向spans区域,用于映射span和page的关系
bitmap:bitmap的起始地址
arena_start: arena区域首地址
arena_used: 当前arena已使用区域的最大地址
central: 每种class对应的两个mcentral
从数据结构可见,mheap管理着全部的内存,事实上Golang就是通过一个mheap类型的全局变量进行内存管理的。mheap内存管理示意图如下:
系统预分配的内存分为spans、bitmap、arean三个区域,通过mheap管理起来。接下来看内存分配过程。
针对待分配对象的大小不同有不同的分配逻辑:
(0, 16B) 且不包含指针的对象: Tiny分配
(0, 16B) 包含指针的对象:正常分配
[16B, 32KB] : 正常分配
(32KB, -) : 大对象分配其中Tiny分配和大对象分配都属于内存管理的优化范畴,这里暂时仅关注一般的分配方法。
以申请size为n的内存为例,分配步骤如下:
Golang内存分配是个相当复杂的过程,其中还掺杂了GC的处理,这里仅仅对其关键数据结构进行了说明,了解其原理而又不至于深陷实现细节。1、Golang程序启动时申请一大块内存并划分成spans、bitmap、arena区域
2、arena区域按页划分成一个个小块。
3、span管理一个或多个页。
4、mcentral管理多个span供线程申请使用
5、mcache作为线程私有资源,资源来源于mcentral。








![[golang] fasthttp 使用http代理](/aiimages/%5Bgolang%5D+fasthttp+%E4%BD%BF%E7%94%A8http%E4%BB%A3%E7%90%86.png)