














一、实验目的
通过运用ENVI软件的3D Surface View功能将二维遥感影像模拟显示为具有立体感的三维透视遥感图的实验操作,增强对三维遥感影像图的形态特征和运用价值的了解,掌握制作三维遥感图的方法。
二、实验内容
①R(TM5)、G(TM4)、B(TM 3)假彩色合成影像图制作;②运用ENVI软件的3D SurfaceView功能和DEM 数据制作三维卫星遥感影像;③三维卫星遥感影像应用分析。
三、实验要求
①实验前准备好与待作三维显示的遥感影像完全空间匹配的DEM 数据;②通过变化成图参数对三维遥感影像进行不同视角的交互式浏览观察;③掌握制作单波段灰阶三维遥感影像和彩色三维遥感影像ENVI的操作方法;④编写实验报告。
四、技术条件
①微型计算机;②国际分幅127-43 TM 影像数据;③与127-43 TM 影像对应的1:50000 DEM数据;④ENVI软件(ver.4.0以上);⑤ACDSee软件(ver.6.0以上)。
五、实验步骤
(1)在ENVI主菜单栏中选择“File>Open Image File”,出现文件目录窗口,分别将127-43 TM 影像数据和对应的DEM数据调入“Available Bands List”窗口,并使127-43 TM 影像数据以RGB(B5\B4\B3)方式显示到“Display”中。
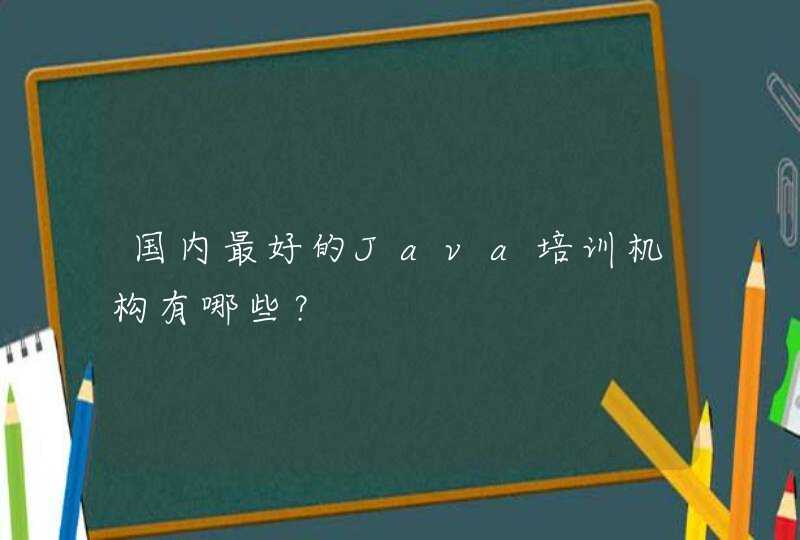
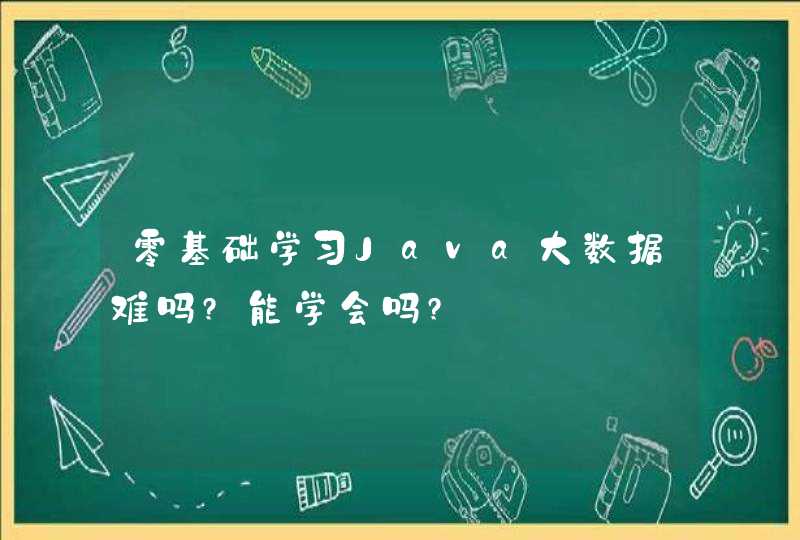
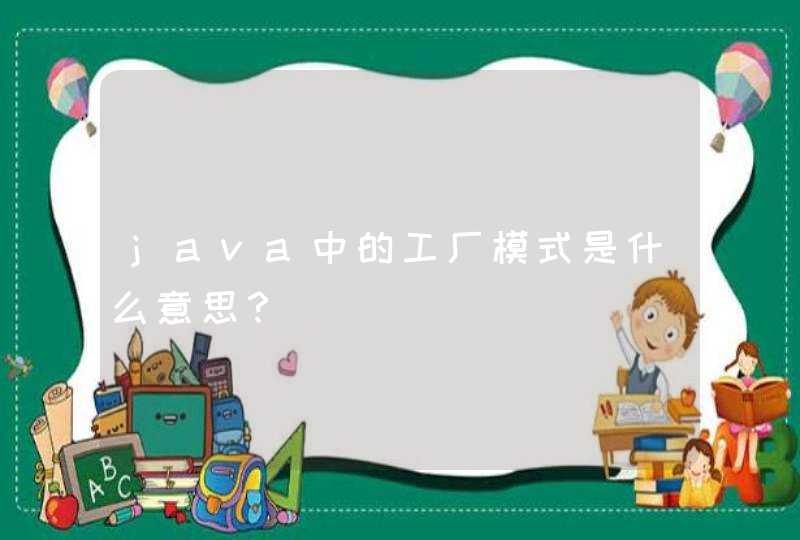
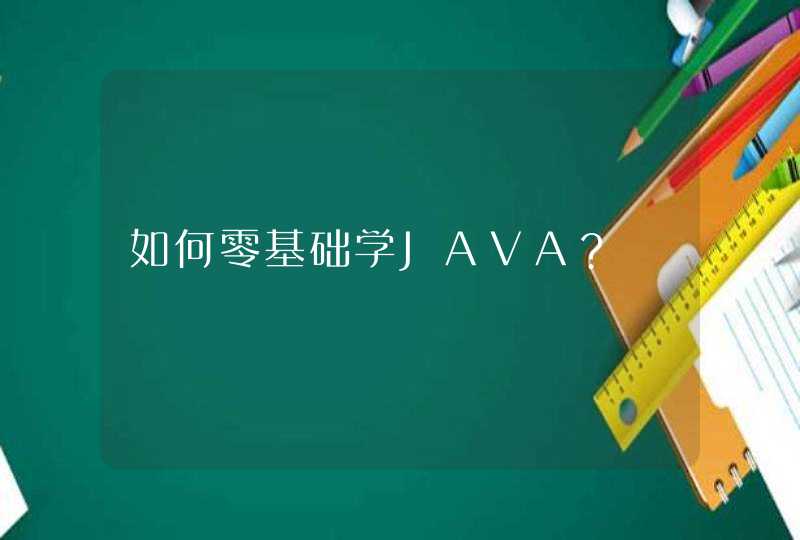
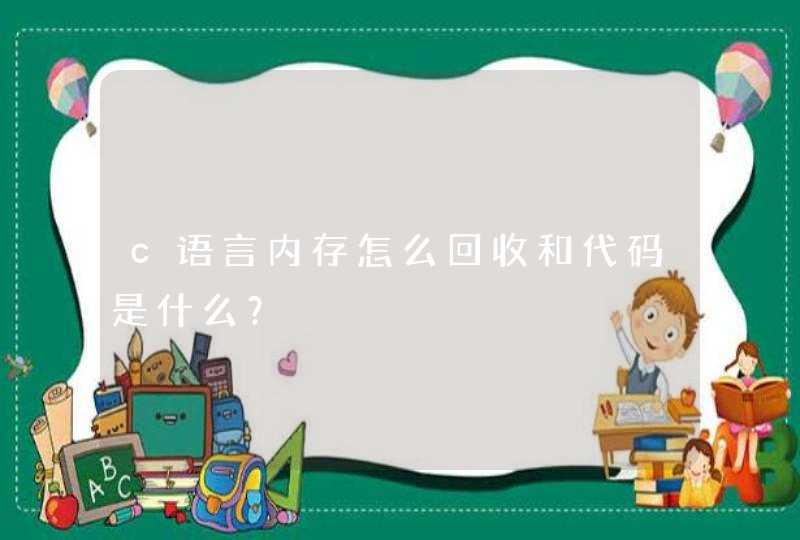
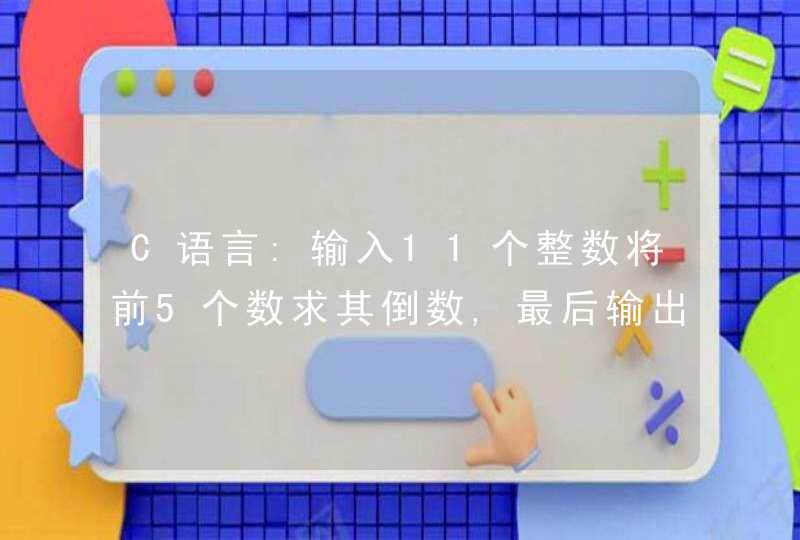
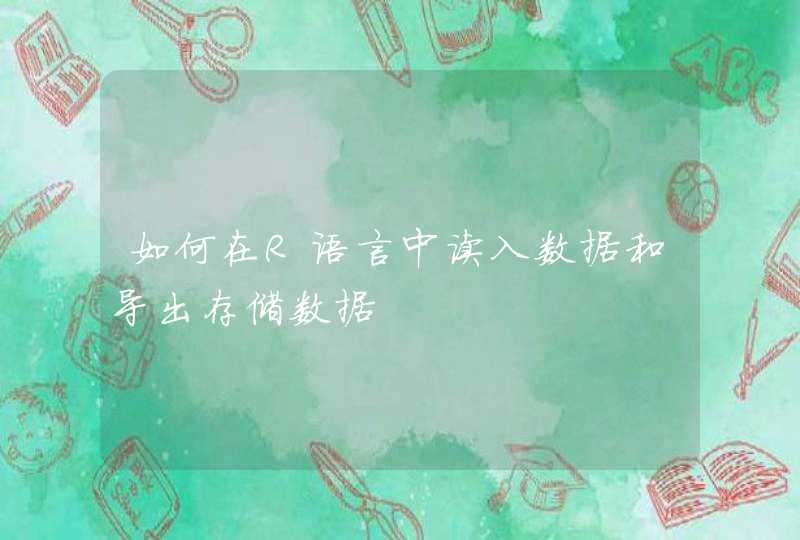
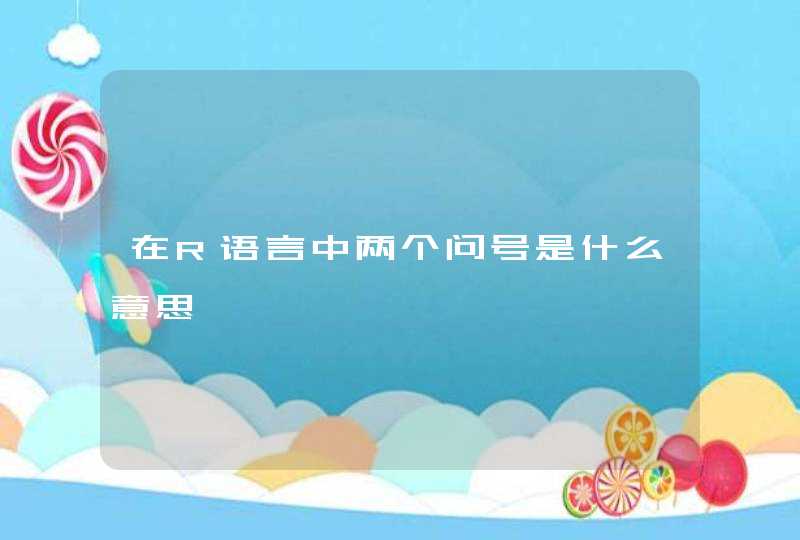
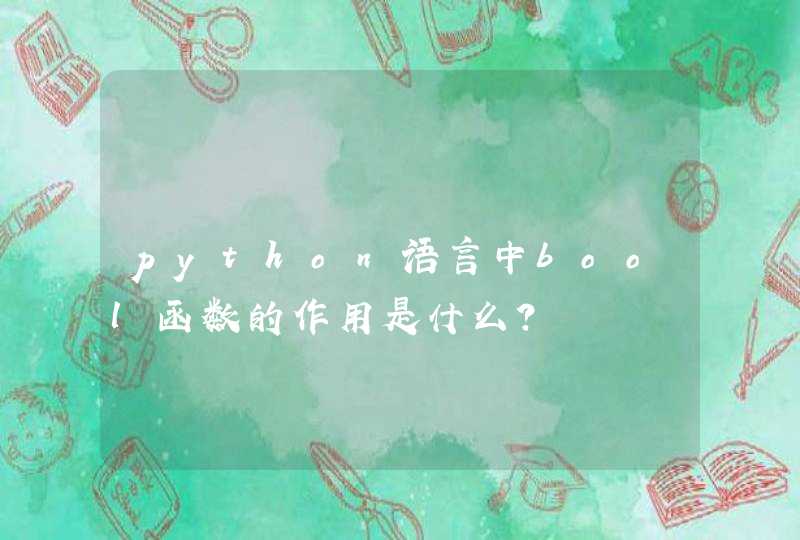
(2)在ENVI主菜单栏中选择“Topographic>3D SurafceView”,在“Associated DEM Input File”对话框中选择DEM数据,点击【OK】按钮确定,打开“3D SurafceView Input Parameters”对话框(图22-1)。
(3)在“3D SurfaceView Input Parameters”对话框中,设置以下参数:
DEM Resolution(DEM分辨率):可以根据实际需求选择不同的分辨率,DEM 将按照所选择的分辨率被重采样。使用较高分辨率会减慢可视化速度;
图22-1 三维可视化输入参数设置
Resampling(重采样方法):ENVI提供“Nearest Neighbor”(最邻近)和“Aggregate”(集合)两种重采样方法;
DEM min plot value和DEM max plot value(DEM最小和最大值范围):从DEM数据中选取满足特定需要的数据值,低于最小值和高于最大值的DEM 值,将不被绘制在三维场景中;
Vertical Exaggeration(垂直放大系数):输入的值将使得垂直方向真正放大。值越高,放大越多;
lmage Resolution(图像纹理分辨率):选择“Ful”l(原始大小)或“Other”(设定值)图像分辨率,若选择“Other”,图像将按输入的像元数被重采样,并提示选择重采样方法。
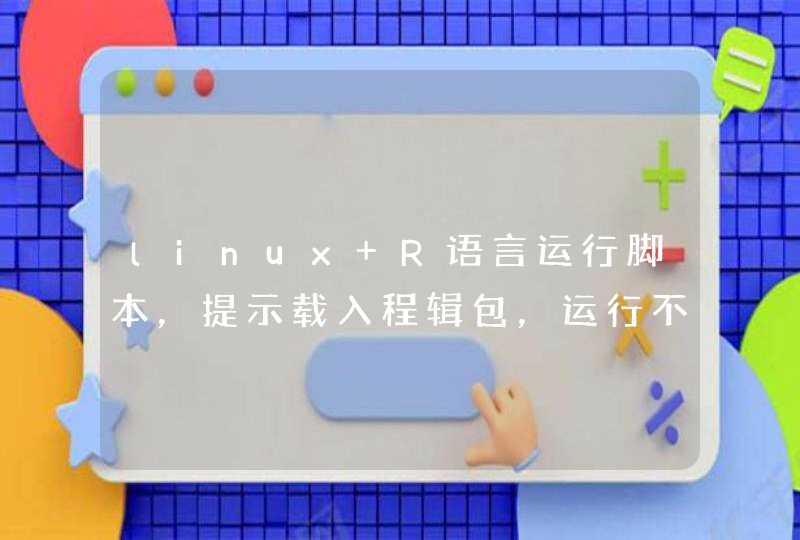
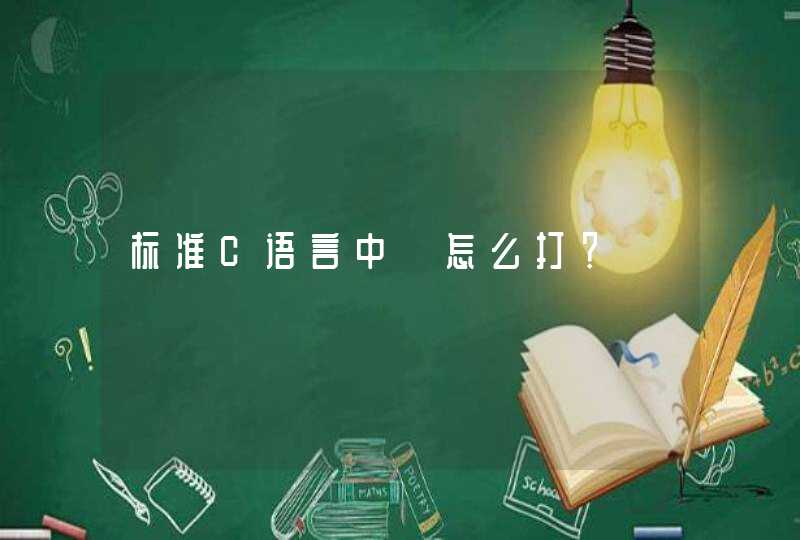
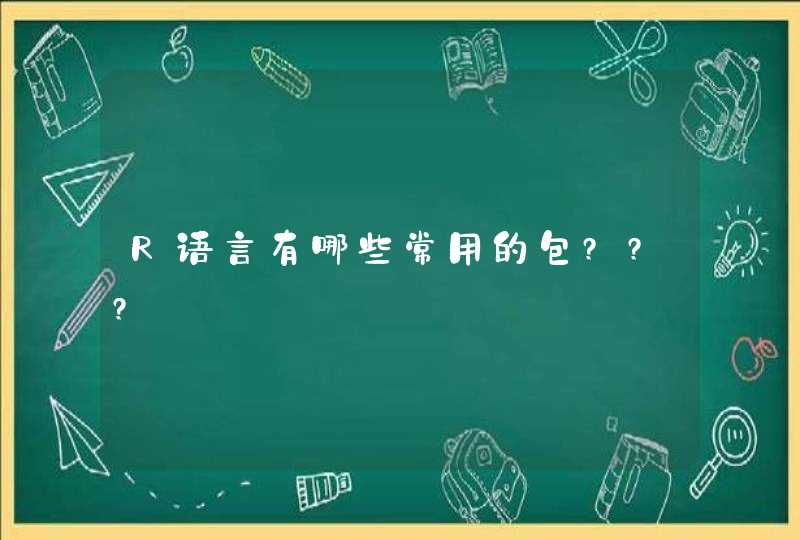
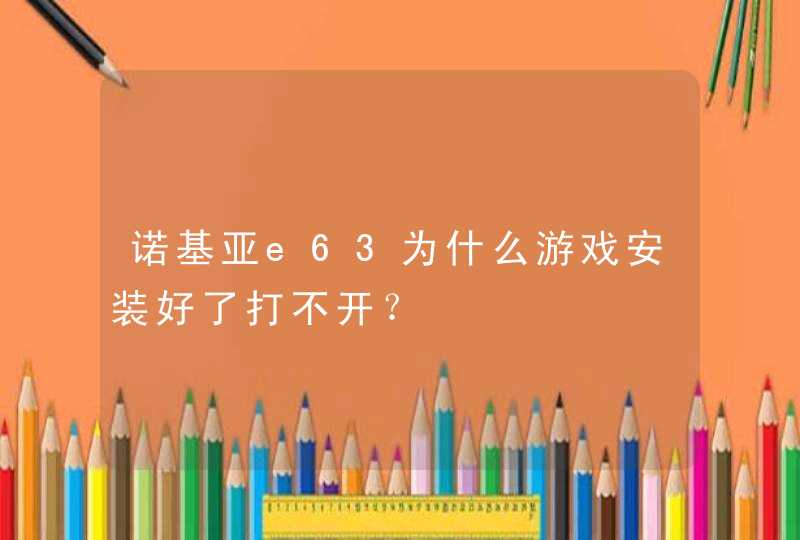
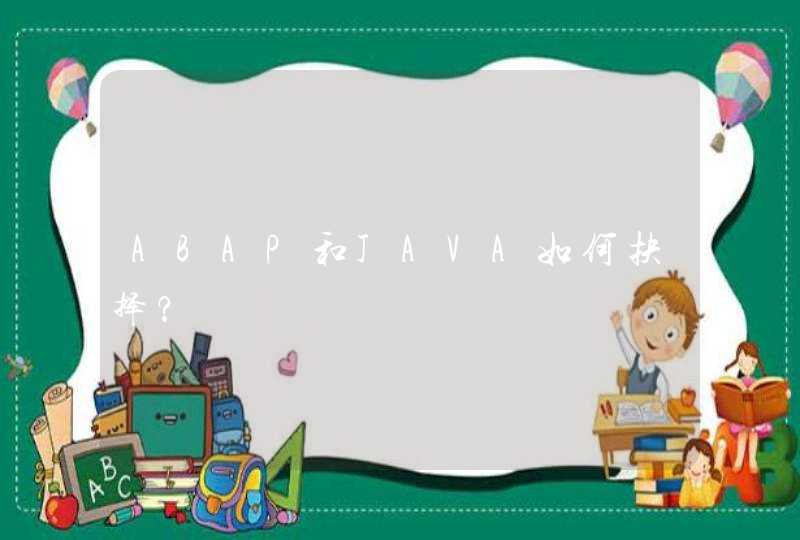
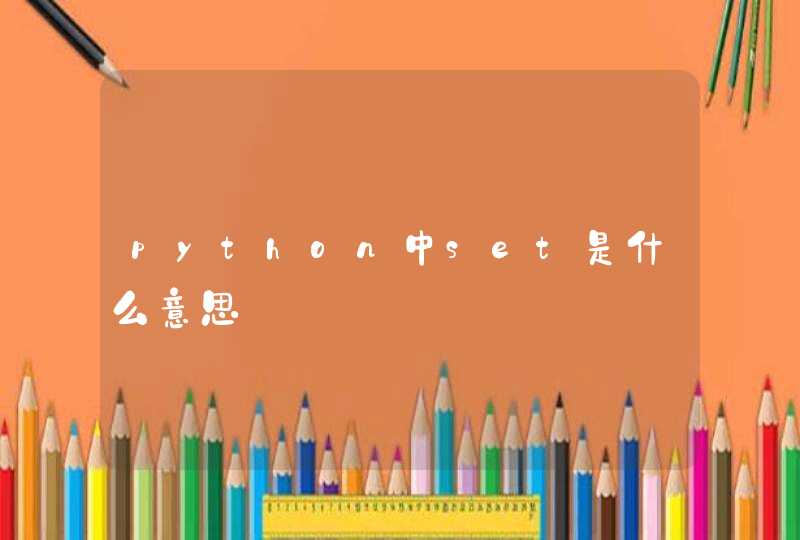
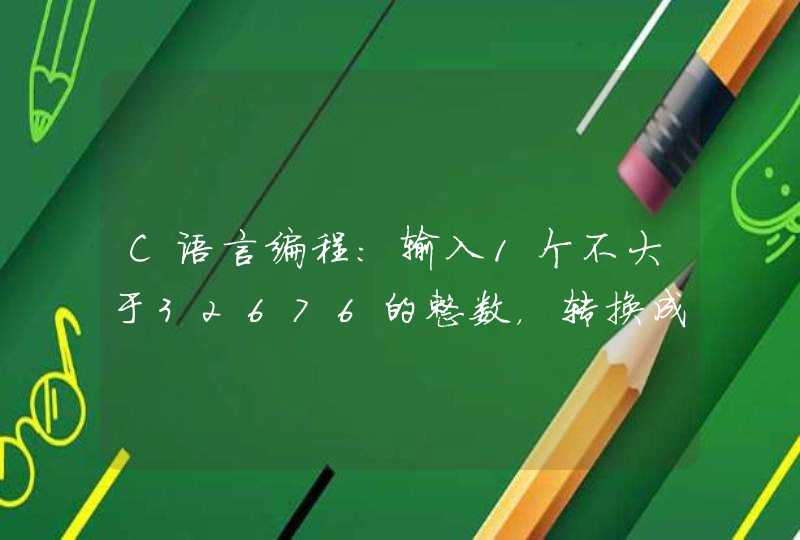
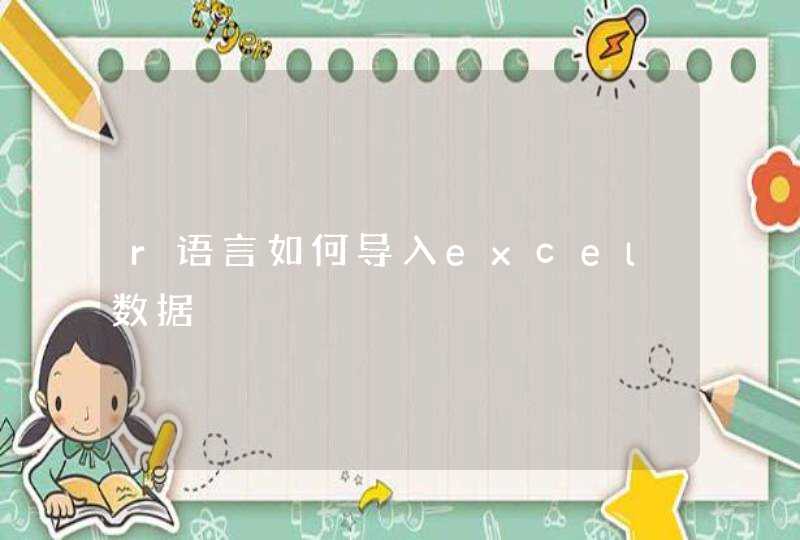
(4)设置好上述参数后,点击【OK】按钮,创建三维场景,如图22-2所示。
在“3D SurfaceView”窗口中,可以保存三维场景为图像文件(File>Save Surface As),也可以选择“Options”选项对三维场景背景进行更改、添加或移除矢量文件等。
(5)交互式三维场景浏览:可以通过鼠标控制旋转、平移及缩放三维曲面。
◎点击并拖放鼠标左键旋转X -Y平面,双击鼠标左键能够定位到显示窗口内的像元;
◎点击并拖放鼠标中键可以平移图像;
◎点击并向右拖放鼠标右键可以放大三维场景;
◎点击并向左拖放鼠标右键可以缩小三维场景。
图22-2 127-43幅TM影像3D透视图
六、实验报告
(1)简述实验过程。
(2)回答问题:①制作遥感三维影像图需要哪些数据?对这些数据有何要求?②遥感三维影像图实际有四维信息,是哪四维信息?③遥感影像三维可视化技术在实际地质工作中有何用途?
实验报告格式见附录一。
一、遥感数据及其特征
滇东北地区铅锌矿遥感地质调查工作共分为三个层次,其中1∶5万层次及1∶2.5万层次使用美国陆地卫星(Landsat-7)ETM+数据作为基础数据,1∶1万层次使用美国快鸟(QuickBird)卫星数据作为基础数据。
(一)ETM+数据
ETM+数据是美国1999年4月所发射的陆地7号卫星携带的增强型主题成像仪(ETM+)对地球表面所采集的数据,其基本参数、设计波段的特征及设计用途见表3-1。
表3-1Landsat-7卫星参数及数据特征
长期对Landsat系列卫星数据在地质方面的应用研究表明,Landsat卫星数据各个波段都能提供地质构造、地形地貌信息。其中,5、6、7波段信息量更为丰富,1、2、3、4波段能够区分岩石中的铁、锰矿物和含铁、锰矿物的相对含量,尤其是4波段对于三价铁的矿物比较敏感,可以借此区分岩性,5波段对绿帘石族特征谱带敏感,7波段识别碳酸盐岩、绿片岩、绢云片岩和粘土岩及粘土矿物聚集带的效果较好,6波段对于识别地热异常、岩石和构造的含水性及鉴别地质构造有一定的用途。另外,Landsat-7还增加了一个15m分辨率的全色波段,从视觉效果上直接提高了对地物的识别,见表3-2。
表3-2 Landsat-7ETM+数据特征及在地质上的用途简表
图3-1 滇东北地区ETM数据分布示意图
本次工作范围占有ETM数据129-041及129-042两景,时相均为2001年12月23日。工作范围在两景数据中的位置如图3-1。数据元数据情况见表3-3。
表3-3 129-041,129-042卫星数据元数据特征
续表
(二)快鸟(Quick Bird)卫星数据
快鸟(Quick Bird)是美国Digital Globel(Earth Watch)公司2001年10月发射的高分辨率卫星,其空间最高分辨率为61cm,可制作比例尺在1∶1万左右的影像。卫星参数及数据特征见表3-4。
表3-4 Quick Bird卫星参数及数据特征
快鸟卫星数据的波段设置,与ETM数据具有一定的对应性,1、2、3、4波段波长范围完全一致,只是在全色波段快鸟数据比ETM数据的波长范围略窄一些。
大比例尺遥感地质调查工作主要布设于彝良毛坪地区,购置快鸟数据80km2,范围为X:3038000—3046000,Y:35392000—35402000。属于现拍数据,数据采集时间为2004年5月8日,其元数据特征见表3-5。
表3-5 毛坪地区快鸟卫星数据元数据特征
二、遥感数据处理
(一)数据处理软件
遥感图像处理主要使用加拿大专业遥感图像处理软件PCIGeomatica8.0及美国著名专业遥感图像处理软件ENVI3.5。
(二)数据处理流程
遥感数据处理的主要流程包括数据组织(即数据种类选择、范围确认、时相选择、订购等)、数据镶嵌(单景数据不存在此过程)、几何校正、图像生成、图像增强、图像整饰等过程,见图3-2。
图3-2 数据处理流程图
(三)数据处理
1.数据镶嵌
所谓镶嵌,就是将相邻两景图像拼接、形成大图像的过程。在图像镶嵌过程中如果使用不同时相的数据,由于数据成像的季节、太阳高度角不同,导致同名像元点在不同的数据上可能表现为不同的灰阶当使用相同时相数据时,由于地面站后期人为分景、单独处理,也会导致同名像元点在不同的数据上有可能表现为不同的灰阶,同一地物在不同数据上表现出不同特征。因此说,图像的镶嵌过程是一个数据重叠范围内的配准过程。
滇东北地区1∶5万工作区涉及129-041及129-042两景数据,数据镶嵌是在PCIGeomatica遥感图像处理平台的GCPworks模块中完成的。镶嵌过程中侧重于重叠数据范围内同名点的选择及镶嵌线的选择。一般每两景图像上下镶嵌选择10~15个GCP。在镶嵌线的选择上,避免一条直线,根据镶嵌区的地貌特征尽量使镶嵌线通过色差较大的地方,避免人为造成线性体。然后利用PCI提供的ColourMatching功能对镶嵌区内的图像色彩进行匹配,使镶嵌后图像的色彩在镶嵌线两侧柔和过渡,达到无缝的效果。
2.几何校正
(1)几何校正方法
由于卫星姿态与轨道、地球运动和形状、遥感器本身的性能和扫描镜的不规则、探测器的配置、检测器采样延迟、数模转换的误差等等原因,均会导致原始遥感图像的严重几何变形,不能直接使用。一般而言,卫星地面站会根据卫星轨道的各种参数将图像进行粗略的校正,但往往由于遥感器的位置及姿态的测量值不高,其粗校正后的图像仍存在不小的几何变形。用户需要利用地面控制点和多项式纠正模型做进一步的几何纠正。只有按照一定的投影模式对原始图像进行几何精校正后的图像,才能使图像上每个像元具有相应的准确的地理坐标,只有进行几何精校正后的图像才能制作成能与其他图件配合使用的“地图(map)”。几何纠正的步骤有以下3步:
1)地面控制点(GCP)的选择。地面控制点的选择一般有两种方法,实地测量和在相同比例尺或更大比例尺地形图上采点。地面控制点选择的原则是,选择在图像上显示清晰、实地不(或很少)随时间变化的定位识别标志,如道路交叉点、河流交汇处等。另外,控制点要在校正范围内均匀分布,并保证一定的数量。
2)多项式模型纠正。多项式模型纠正就是在图像像元坐标(x,y)与地形图上相应点的地理坐标(X,Y)之间通过适当的坐标多项式模型(坐标变换函数)建立一种关系,从而通过像元的重新定位把图像拟合到地形图上。多项式校正模型的数学表达式为:
滇东北铅锌银矿床遥感地质与成矿预测
式中:aij,bij为多项式系数N为多项式次数,取决于图像的变形程度、控制点的数量和地形位移的大小。
3)重采样。由于经过了多项式校正,重新定位后的像元在原图像中分布是不均匀的,因此需要对原图像按一定的规则重新采样,进行亮度值的插值计算,建立新的图像矩阵。常用的重采样方法有最临近法、双线性内插法、三次卷积内插法。3种方法在地物边缘增强、地物连贯性、计算速度等方面各有利弊。其中三次卷积内插法对边缘有所增强,并具有均衡化和清晰化的效果,但计算量大。
(2)1∶5万工作范围图像几何校正
1∶5万工作范围图像校正使用相应范围的1∶5万地形图60幅。校正点的选择是在60幅地形图上均匀选择GCP203点,校正模型选择了二次多项式拟合,重采样方法使用三次卷积内插法。校正后的图像投影方式为高斯投影、6°分带,中央经线为105°,椭球体采用克拉索夫斯基1954椭球体,与地形图保持一致。
(3)1∶1万工作范围图像几何校正
由于缺少相同比例尺地形图,收集到的地形资料只有区内1∶5万地形图和极少部分1∶2000地形图,因此校正点的采集采用地形图采点与野外实地测点相结合的方法完成。共采集GCP33个。校正模型选择了二次多项式拟合,重采样方法使用三次卷积内插法。校正后的图像投影方式为高斯投影、3°分带,中央经线为105°,椭球体采用克拉索夫斯基1954椭球体。
3.彩色合成
彩色合成的目的是将单色波段每像元的28(即256)色空间扩展到224(即16777216)色空间,增强目标地物的可视性,提高目视解译效果。通过色彩丰富、信息携带量大的基础彩色图像,解译人员才能充分识别图像的信息,进行地质解译。
为达到最佳的彩色合成效果,参加合成的波段选择常遵循以下原则:
1)参加合成的单波段有较大的方差,即波段本身具有较大的信息量。
2)参加合成的各波段间相关系数较小,避免信息的重复和冗余。
3)参加合成的三波段图像的均值要相近,避免合成图像产生严重偏色。
4)为突出目标地物,要选择目标物体显示较为突出的波段。
彩色合成图像为3个波段,赋予红、绿、蓝三原色的合成图像。
1∶5万工作范围基础图像制作选择了波段7、4、2合成方案,1∶2.5万工作范围基础图像选择了波段4、5、3合成方案,1∶1万工作区基础图像选择了波段3、2、1合成方案。选择依据将在“数据特征”一节中进行分析。
4.图像增强
图像增强的目的是为了突出相关的主题信息,提高图像的视觉效果,使解译分析者能更容易地识别图像内容,从而从图像中提取更有用的信息。图像增强的方法很多,从其作用的空间来看可以分为光谱增强和空间增强。这两种增强类型在整个图像处理和信息提取过程中都很常用。对于基础图像的增强一般采用光谱增强,从像元的对比度及波段间的亮度等方面改善图像的视觉效果,基本不改变目标地物的形状、大小等特征。
项目工作中的3种基础图像在生成后均采用光谱增强。根据图像各波段的直方图分布,分析整幅图像中像元间对比度的差异大小,确定光谱增强的具体手段。其中1∶5万范围的波段7、4、2合成图像面积大,地物种类多,信息丰富,增强过程中要求各种信息的充分显示,因此使用直方图均衡化的方法,理论上使图像中的各种亮度值均衡分布。1∶2.5万范围的波段4、5、3合成图像,图像范围相对较小,又由于地形切割较深,造成图像上山体阴影所占面积较大,而西南角地区比较平坦,反射率较高,像元亮度大,因此选择线性拉伸的方法进行增强。1∶1万范围的快鸟卫星波段3、2、1数据合成影像中,红尖山—姜家湾—花苗寨一带植被覆盖较多,造成影像上大面积绿色,使用线性拉伸的方法可以保证原始图像的对比度不再有大改变。
图3-3 毛坪地区图像不同拉伸方法效果对比图
拉伸方法应用效果以毛坪地区1∶1万影像为例,见图3-3。由图中可以看出,不拉伸的图像显然色彩层次太少,使用均方根拉伸的图像总体上提高了图形的亮度,压抑了像元间对比度的扩展,同时亮度高的地区彩色层次减少直方图均衡化的图像提高了像元间的对比度,在原图像的暗色地区使色彩层次增加,但高亮色地区由于像元频率的增高而使色彩层次减少线性拉伸不同程度地克服了以上几种拉伸的弊端,使图像色彩趋于丰富,层次趋于明显,便于解译者的解译。
在解译过程中为突出某种特征地物也可采用其他的增强手段,这里不再赘述。
5.图像融合
为了提高图像清晰度,同时充分发挥多波段数据的特点,需要将高分辨率的全色波段与参加彩色合成的多光谱波段进行融合处理。融合后的图像可以发挥多光谱图像与高分辨率图像各自的优势,弥补不足,改善遥感图像目标识别的准确率,提高遥感图像的综合分析精度。
融合方法大致可以分为彩色相关技术和数学方法两大类。彩色相关技术包括彩色合成、彩色空间变换等,有利于保持分辨率和色彩特征,如IHS变换法。常用的融合方法有IHS变换法、PCA变换法、HPF变换法与小波变换法等。
鉴于工作目的,为了提高地面分辨率和保持低分辨率图像的光谱信息,工作中选择了IHS变换方法,即将标准的RGB图像分离为空间信息的明度、波谱信息的色别及饱和度,而后用高分辨率图像代替明度再进行反变换的融合方法。融合后的图像既具有较高的分辨率,又具有与原图像相同的色度与饱和度。其具体过程如图3-4。
项目工作中所采用的ETM数据7个30m多光谱波段与15mPAN波段源于同一传感器,快鸟数据的4个2.4m多光谱波段与其0.6mPAN波段也源于同一传感器,因此数据融合过程中不存在数据配准问题,只对低分辨率波段进行重采样,并对参加融合的各波段进行直方图匹配,再进行IHS变换和RGB变换。其中低分辨率波段的重采样使用的方法为三次卷积内插法。融合前后图像特征如图3-5所示。
图3-4 IHS变换融合流程图
图3-5 融合前、后图像特征对比示意图
(四)图像处理精度评价
镶嵌校正过程中的精度评价常常使用RMS误差(均方根)来衡量,RMS是GCP的输入位置和逆转换之间的距离它是在用转换矩阵对一个GCP做转换时所期望输出的坐标与实际输出的坐标之间的偏差。
滇东北铅锌银矿床遥感地质与成矿预测
式中:Ri为GCPi的RMS误差,XRi为GCPi的X残差,YRi为GCPi的Y残差。
整幅图像的总RMS误差:
滇东北铅锌银矿床遥感地质与成矿预测
式中:T为总RMS误差。
1.1∶5万镶嵌精度
数据镶嵌的误差大小对几何校正有很大影响,大的误差将人为增大图像的畸变。工作中1∶5万工作范围需要129-041与129-042两景数据上下镶嵌,按照《1/25万遥感地质调查技术规定》(DD2001—01)对镶嵌配准精度的规定同比计算,预设镶嵌误差T≤0.40。镶嵌过程中共采集镶嵌GCP13个,纠正模型1次,误差见表3-6。
表3-6 1∶5万图像镶嵌误差
由表3-6中可以看出,T=0.311,小于预设值0.40,能够满足无缝镶嵌的要求。
2.校正精度
(1)1∶5万图像校正精度
校正精度按照《1/25万遥感地质调查技术规定》(DD2001—01)对图像校正精度及校正点数目的同比计算,预设校正误差T≤0.80。校正过程中在60幅1∶5万地形图上基本均匀地选择203点,经误差调整选择有效校正GCP190个,校正多项式模型选择二次多项式,其误差见表3-7,由表中可以看出,T=0.794,小于预设值0.80,能够达到规范要求。
表3-7 1∶5万图像校正误差
(2)1∶1万图像校正精度
由于工作区只收集到1∶5万地形图和占很小部分的1∶2000地形地质图,且1∶5万地形图年代比较久远,因此在几何校正过程中误差较大。由于图像细节清晰,不影响使用与定位。
3.融合精度
低分辨率数据与高分辨率数据融合的目的是为了提高分辨率,为此,图像融合前后清晰程度的改变成为融合精度评价的主要指标。图像的清晰度是指地物的边界或影线两侧附近灰度有明显差异,即灰度变化率大小,它反映图像微小细节反差变化的速率,即图像多维方向上密度变化的速率,可用g来表示,一般来说融合前后g的变化越大则融合后图像的清晰度越高。
滇东北铅锌银矿床遥感地质与成矿预测
ETM30m多光谱波段与15m全色波段融合前后的值及快鸟数据2.4m多光谱数据与0.6m全色波段融合前后的g值对比见表3-8。由表中可以看出,融合后密度变化速率比原来提高几十到上百倍,表明图像融合后精度有很大提高。
表3-8 融合精度对照
三、工作区遥感数据
(一)1∶5万工作范围ETM数据特征
1∶5万工作范围图像行列数为9233(列)×12423(行)(插值为15m),总像元数为114701559点,由于左上角数据缺少使1140点为无效像素。
数据基本统计特征如表3-9至表3-11,各波段直方图见图3-6。
表3-9 1∶5万范围ETM数据基本统计特征
表3-10 1∶5万范围ETM数据波段间协方差矩阵
表3-11 1∶5万范围ETM数据波段间相关系数矩阵
从以上统计参数来看,8个波段的均值除60m分辨率的波段6和15m分辨率的PAN波段外,其他6个波段相差不大。8个波段的标准差从大到小排列为S5>S7>S4>S3>S6>S8>S2>S1,表明波段5的像元亮度值离散程度最大,波段1最小。对于波段间的相关系数而言(由于6波段与8波段分辨率的不同而不考虑),R12、R23、R25、R35、R45、R57、R37、R27均比较大,数值在0.80以上,而R13、R24、R34、R47相对较小,数值在0.7~0.8之间,相关系数最小的为R14、R15、R17,数值在0.5~0.6之间,相关系数大小也表征了波段间信息冗余的多少。1∶5万工作范围的彩色合成方案就是根据以上的统计数据结合彩色合成波段选择的其他原则而确定的。
直方图是图像范围内每个亮度值(DN)的像元数量的统计分布,能够直观反映原始图像的质量信息,如亮度值分布范围、亮度值分布规律,也可直接大致判读出图像的中值等参数。从8个波段的直方图可以看出波段4、5、7的直方图呈双峰表现,主峰在50~60出现,而在10~15之间又出现一个表现很窄的次峰,这是由于图像上的阴影及水体的像元亮度值所产生的,由此大致可以计算出阴影及水体在图像中所占的面积,以波段5为例计算出所占比例为6%左右。其他各波段的直方图比较接近正态分布。
协方差矩阵反映各个波段各自亮度值取值的分散程度,同时又能反映不同波段间的相关密切程度,它是单波段图像统计表与相关系数矩阵的合成,同时又能反向分裂。
图3-6 1∶5万范围ETM各波段图像直方图
(二)1∶2.5万工作范围ETM数据特征
1∶2.5万工作范围行列数为3000(列)×1860(行),总像元数为5580000点,插值后分辨率为15m。数据基本统计特征如表3-12至表3-14,各波段直方图如图3-7。
表3-12 1∶2.5万范围ETM数据基本统计特征
表3-13 1∶2.5万范围ETM数据波段间协方差矩阵
表3-14 1∶2.5万范围ETM数据波段间相关系数矩阵
图3-7 1∶2.5万范围ETM各波段图像直方图
从以上统计参数来看,8个波段的均值除60m分辨率的波段6为110表现较大,15m分辨率的PAN波段为29表现较小外,其他1、4、5三个波段数值相差不多,在50左右,2、3、7三个波段也相差不大,在37左右。8个波段的标准差从大到小排列为S5>S4>S7>S3>S8>S6>S2>S1,表明波段5的像元亮度值离散程度最大,波段1最小。对于波段间的相关系数而言(由于6波段与8波段分辨率的不同而不考虑),R57、R23、R73表现最大,数值在0.9以上,R12、R13、R25、R27、R35、R45次之,数值在0.8~0.9之间,而R24、R34、R47相对较小,数值在0.7~0.8之间,相关系数最小的为R14、R15、R17,数值在0.5~0.6之间,相关系数大小也表征了波段间信息冗余的多少。1∶2.5万工作范围的彩色合成方案就是根据以上的统计数据结合彩色合成波段选择的其他原则而决定的。
8个波段的直方图形态大致与1∶5万范围一致,表现意义相同,不再赘述。
(三)1∶1万工作范围QB数据特征
1∶1万工作范围采用高分辨率的QB数据,其多光谱波段只有4个,分辨率为2.4m,工作范围图像行列数为4168(列)×3407(行),总像元数为14200376点。多光谱数据基本统计特征如表3-15、表3-16,各波段直方图如图3-8。
表3-15 1∶1万范围QB数据基本统计特征
表3-16 1∶1万范围QB数据波段间相关系数矩阵
从以上统计可以看出,QB数据4个波段中1、2、3波段的相关系数均较大(R12=R23=0.96,R13=0.89),只有近红外波段与其他波段的相关系数很小(R14=0.29,R24=0.37,R34=0.20),同时可以看出近红外波段的中值与标准差也与其他波段相差很大,这是由于工作区内大面积植被所引起的。众所周知,绿色植物的叶绿素对可见光红波段(0.6~0.7μm)有强吸收,而叶内组织对近红外波段(0.7~1.1μm)有高反射,因此大面积植被将会直接改变相关波段的像元亮度值的分布。在基础图像彩色合成波段选择中,依据各项原则结合统计参数,选择波段1、2、3参与合成,为使合成后图像接近真彩色,合成方案为3(R)+2(G)+1(B)。
图3-8 1∶1万范围QB各波段图像直方图
四、遥感信息增强与提取
为了突出地质目标,增强微弱岩石蚀变信息,在图像处理过程中的不同阶段使用了多种信息增强技术方法,主要有地表三维技术、比值运算、KL变换、空间滤波、彩色变换技术等(表3-17)。
表3-17 工作中采用的主要信息增强方法技术及用途
(一)地表三维技术
地表三维技术是利用DEM(数字高程模型)将地图上的二维平面空间按高程的差异制作成一种地形上连续起伏变化的曲面,从而更真实地反映地表地貌的自然景观,突出显示特殊岩性的特殊地貌特征。
毛坪地区地表三维影像的制作利用了1∶5万DEM与QB3、2、1彩色合成图像1∶5万DEM来源于1∶5万地形图,通过等高线数字化—高程赋值—DEM生成等过程实现。地表三维影像的制作主要有DEM与影像的配准及配准后的DEM与影像的复合两个过程。
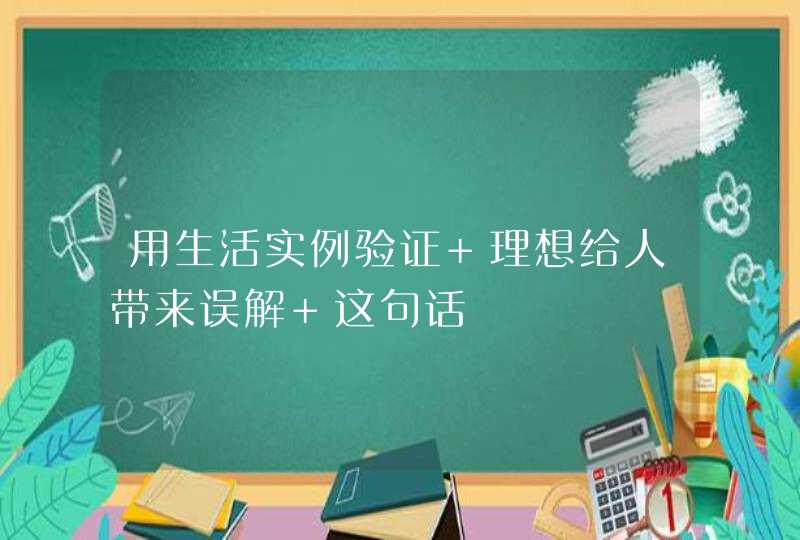
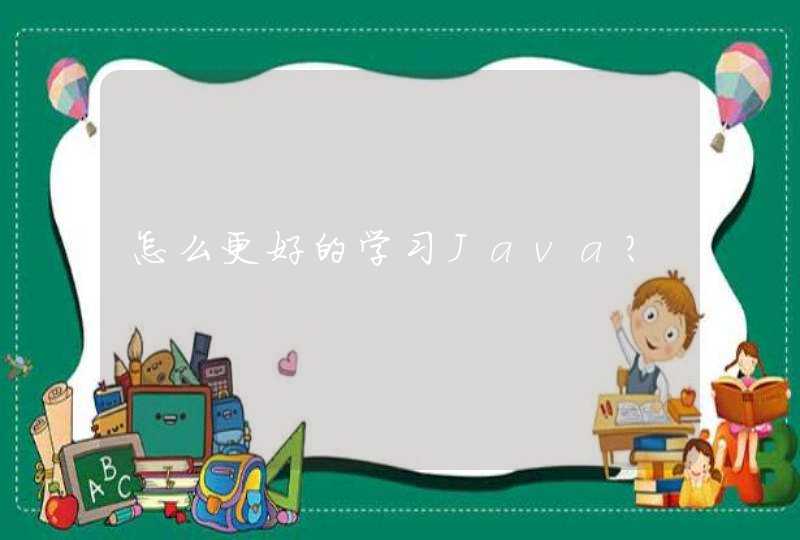
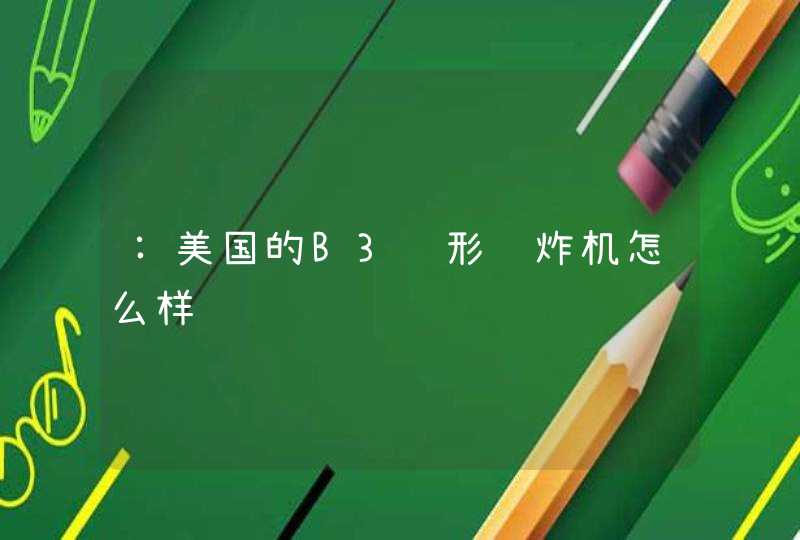
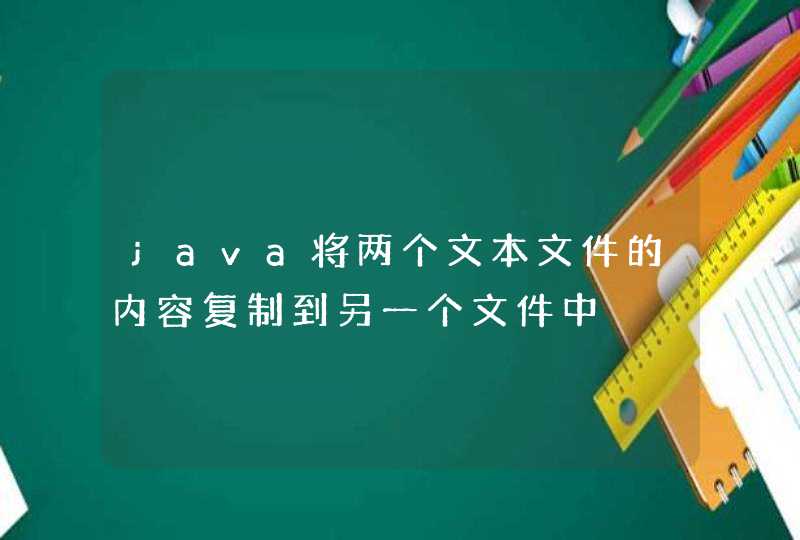
图3-9是毛坪地区地表三维景观局部,其中视点为(103°54'27″,27°27'26″),视向45°,视角60°,视域60°。
图3-9 毛坪地区快鸟遥感影像地表三维景观(局部)
从毛坪地区地表三维影像可以看出左侧发育柱状节理的玄武岩及右侧二叠系灰岩地貌景观。
(二)图像比值运算
比值运算是将两个波段中不同亮度的地物成辐射状投射到一个曲线上,从而可非线性地夸大不同地物间的反差,它能够压抑影像上由于地形坡度和方向而引起的辐射量变化,减小环境条件的影响,提供任何单波段都不具有的独特信息。其运算公式为:
滇东北铅锌银矿床遥感地质与成矿预测
式中:DNm(x,y),DNn(x,y)分别是像元(x,y)在m和n波段上的亮度值Rmn(x,y)为输出的比值。工作中比值运算主要运用于以下两方面。
1.计算植被覆盖度
植被覆盖度(f)是指某一时间某一地区内植被冠层的垂直投影面积与区域总面积之比。遥感地质解译主要是利用地表物体的光谱反射特性的差异,提取与地质工作有关的信息,工作的特点主要针对地表岩石、构造等,当地表植被覆盖时,对这些信息的解译将造成阻碍。因此,了解工作区的植被覆盖度能客观评价该区遥感地质解译的可解译程度。
研究表明绿色植物在可见光红波段(0.6~0.7μm)有强的吸收(叶绿素引起),在近红外波段(0.7~1.1μm)有高的反射和透射(叶内组织引起)。因此,在这两个波段使用比值运算可以充分表达它们反射率之间的差异,制作植被为高亮显示的植被信息图,并直接在图像上以像元数目比值求解植被覆盖度。
2.提取矿化蚀变信息
ETM的不同波段在地质上有不同的应用,这主要取决于各种与矿有关的蚀变矿物在不同波段存在波谱特征上的差异。图3-26是典型蚀变矿物的反射波谱曲线,从图中可看出,通常所讲的泥化蚀变矿物(即含有OH-、CO2-3)在2.2μm附近有明显吸收带,并与TM7波长范围相吻合。而在波段5的波长范围(1.55~1.75μm)内少有矿物的吸收谱带,多数都表现出高反射的特点,未蚀变矿物在波段5范围均没有明显的波谱特征,表现在TM5与TM7两个波段的相对亮度值的相对差异。因此,常常可使用波段5/7比值来突出含羟基和CO2-3类的蚀变矿物特征。另外,由图中可以看出三价铁矿物在波段1具有强的吸收,而在波段3具有相对强的反射二价铁矿物在波段4具有强的吸收,而在波段5相对具有反射特征,因此也常用波段5/4、3/1比值来突出铁类矿物蚀变特征。比值后的图像上欲突出的蚀变特征常以高亮值显示而被提取出来。
(三)KL变换
KL变换又称为主成分分析,是在统计特征基础上的多维(如多波段)正交线性变换。多波段图像通过这种变换后产生一组新的组分图像,把原来多个波段中的信息进行集中和重组,并使新组分图像之间互不相关。其运算公式为:
滇东北铅锌银矿床遥感地质与成矿预测
其中,X为原图像p个波段的像元值向量,Y为变换后的q个组分的像元值向量,q≤
,T为变换矩阵。
KL变换要求Y的分量Yj与Yk相互独立,且若有j<k,则Yj的方差小于Yk的方差,所以必须有:
滇东北铅锌银矿床遥感地质与成矿预测
又因为:
所以:
即把矩阵D(X)变为对角矩阵Λ,对角线元素λ1、λ2…λp是D(X)的特征值,也分别是Y1、Y2…Yp的方差。
KL变换后的新组分图像中,一般第一组分具有大量的信息,但它包含了地形、植被等因素,对地质体的区分而言就成为干扰因素其他组分虽然具有小的方差,包含的信息量少,但它可能正好突出了区分某些地质体的信息。因此,当需要对诸多信息进行综合时,往往使用KL变换后的第一组分,当要求某种特征信息时就选择相关的其他主组分。如图3-10,在B7单波段上玄武岩和火山碎屑岩界线显示隐约(或不显示),而在KL变换(参与波段B1、B2、B3、B4、B5、B6、B7)后的PC3上,界线显示明显。
图3-10 KL变换前后岩性边界对比影像
此外,KL变换也是提取与铁化和泥化有关蚀变的遥感信息的重要方法。通过对KL变换后的特征矩阵进行分析,选择富集特征信息的主组分,对蚀变信息的提取又很大的帮助。在后面信息提取过程中已经使用。
(四)空间信息增强
空间信息增强是指通过改变图像空间特征或频率来增强图像上信息的手段,即改变图像的“粗糙”或“平滑”程度来增强特征信息的方法。工作中使用了方向滤波和平均值滤波。
1.方向滤波
方向滤波是梯度法边缘增强的一种,它通过指定的8个方向的滤波模块对图像按方向进行边缘增强。工作中主要使用在线性体的解译和统计中,滤波后的图像突出显示了某个方向的线性体特征,同时对与该方向正交的线性体进行模糊。如图3-11所示,7波段的图像在分别使用 个方向模板滤波后,分别突出显示了45°方向和135°方向的线性体。
图3-11 方向滤波前后图像对比
2.平滑滤波
当需要去除图像上的噪声时,往往使用平滑滤波或低通滤波,加强图像中的低频成分,减弱图像的高频成分,使图像由“粗糙”变得“光滑”。均值滤波就是一种典型的平滑滤波方法,即用局部范围内临域像元亮度均值代替中心原像元亮度值。工作中平滑滤波主要使用在遥感蚀变信息提取后,信息噪声的去除。如图3-12所示,提取的锈水河铅锌矿异常在平滑滤波后,杂乱细小的信息斑点被去除,信息成“块”成“带”出现,方便了对异常分布的分析。
图3-12 平滑滤波前后PCT分级效果对比
(五)彩色变换技术
彩色变换技术是指将彩色图像在不同的彩色坐标系统之间的变换,主要应用在不同遥感器的数据或不同性质的数据融合后彩色合成图像的产生。在图像融合上常使用IHS变换,其简式如下:
滇东北铅锌银矿床遥感地质与成矿预测
变换后RGB混色系统分离为代表空间信息的明度(I)和代表波谱信息的色别(H)、饱和度(S)。从公式可以看出,明度(I)是3个波段的平均亮度,融合时使用直方图匹配后的高分辨率波段代替I,与原来的H、S一起进行IHS变换的反变换,重新变换到RGB空间,这样图像既保证了高分辨率数据的参与,提高地面分辨能力,又保持了原来多光谱波段的光谱特征。其融合效果参见图3-5。
另外,项目工作中较常用的是RGB彩色合成,当图像的饱和度缺乏时,也通过IHS变换的方法,专门对变换后的饱和度分量(S)进行调整,反变换后的图像可解译性会明显提高。
一、实验目的
通过用像元计算地物之间的距离,了解遥感数字图像像元与空间分辨率的关系,以及遥感数字图像的几何构成及空间结构,掌握基于像元的图像空间测量计算方法。
二、实验内容
(1)运用像元坐标及多边形面积计算公式测算任意形状影像区域的面积;
(2)运用ENVI影像测量工具(Measurement Tool)测算任意形状影像区域的面积。
三、实验要求
预习本实验,认真观摩老师演示。学会ENVI的Cursor Location/Value和Measurement Tool功能使用,切实理解像元含义,能灵活运用手工测算法和ENVI影像测量工具法计算遥感影像上的距离和面积。测量结果存档。编写实验报告。
四、技术条件
①微型计算机;②桂林市TM 1~7波段数据;③ENVI软件;④Photoshop软件(ver.6.0以上)和ACDSee软件(ver.4.0以上)。
五、实验步骤
(1)建立用自己名字命名的实习专用文件夹。
(2)数据输入。选择“File>Open Image File”,出现文件目录窗口,找到存放桂林市TM 1 ~7波段数据的子目录并打开。
(3)影像漫游。通过拉宽主窗口使影像区域得到最大限度的显示,用鼠标移动Scroll窗口中的红色矩形框,可以使主窗口中影像跟着移动,从而可以观察到整个影像区域的遥感影像。
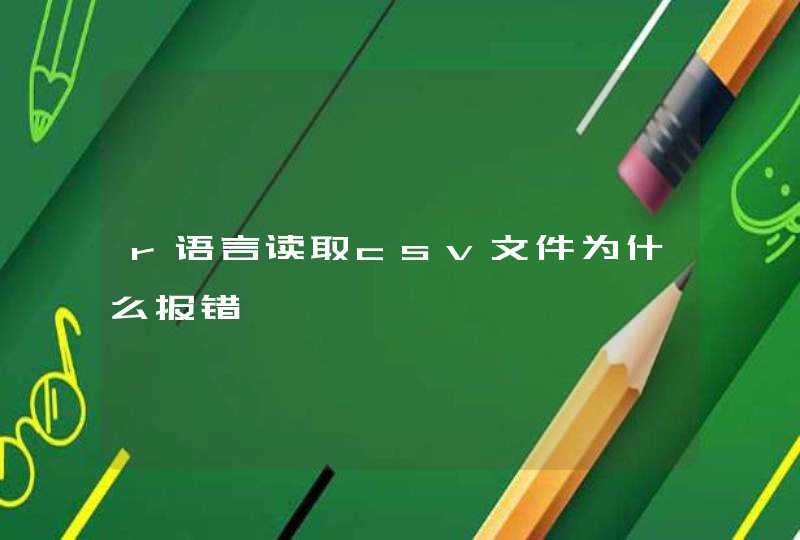
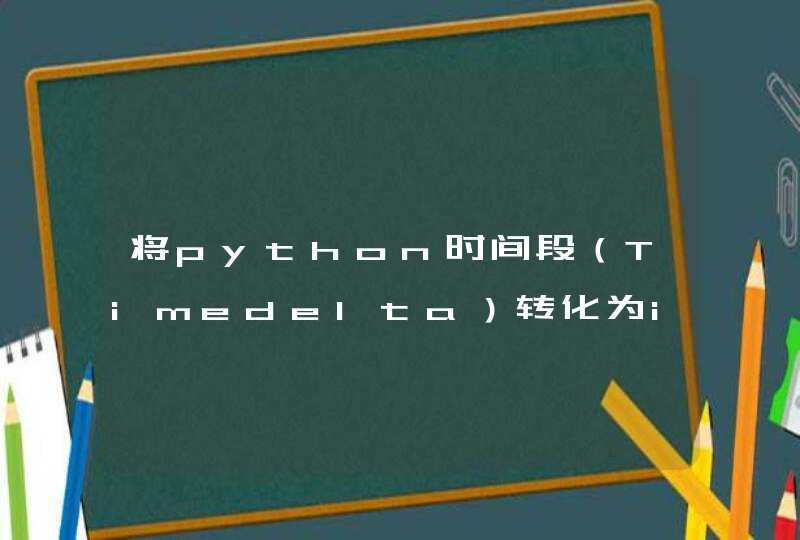
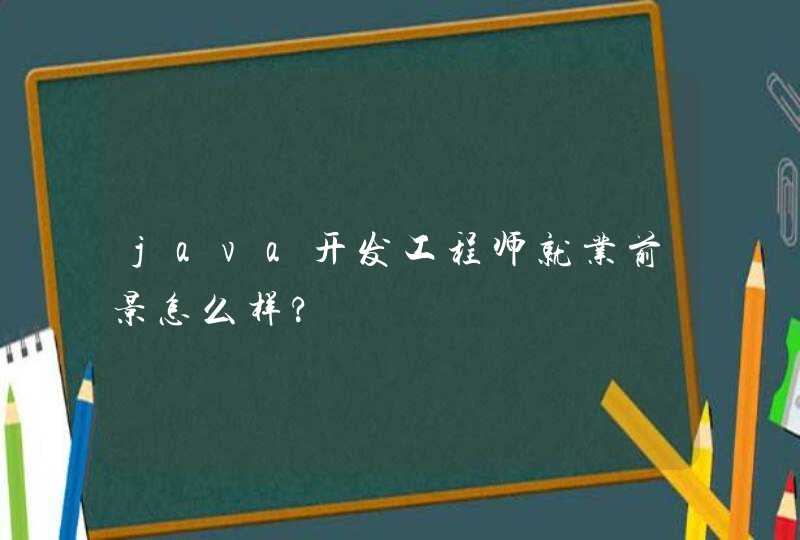
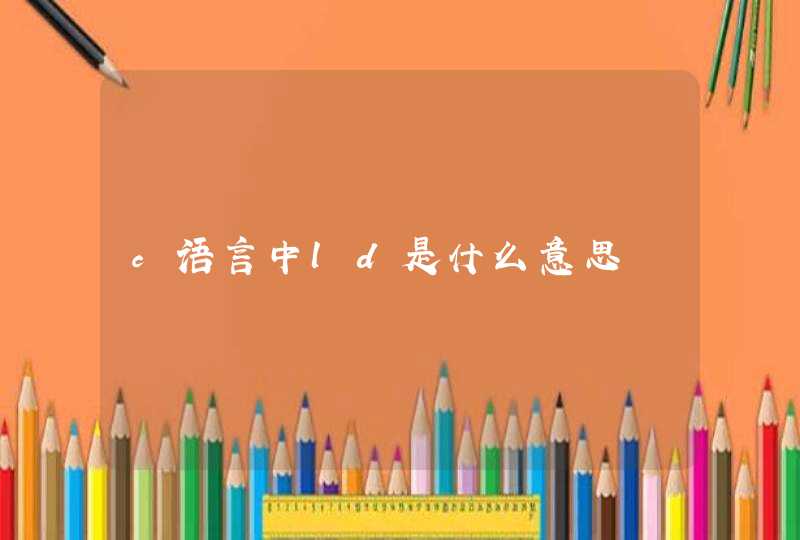
(4)读取图像坐标。用鼠标从上方横条功能菜单中选“Tools>Cursor Location/Value…”,屏幕上出现“Cursor Location/Value”对话框,其中显示四行数据,如图3-1所示。
Disp#1 ——鼠标箭头所在处遥感数字图像的图像坐标,即Sa mple——样(有的也称列),Line— 行—。
图3-1 光标位置/数值窗口
Scrn:R: ——该坐标处三个颜色图像的灰度值(如果是单波段图像,此三值相同)。
Projection: Geographic Lat/Lon— 遥—感影像的地图投影:经纬度地理坐标。只有经过几何校正的遥感影像,才正确显示出该点的经纬度地理坐标。否则,只显示为:LL:0?′0.00″N,0?′0.00″E。
Data: ——该点的影像灰度值,数值范围0~255。
在“Cursor Location/Value”状态下,鼠标箭头移动到图像区任何位置,这四组数据都会跟随显示,因此,就可以轻易读出感兴趣目标位置的准确坐标。
(5)运用像元坐标及多边形面积计算公式手工计算任意影像区域的面积:在完成上述步骤后,用“Tools/Cursor Location/Value”功能,对桂林市TM 假彩色合成影像图(图3-2)中红框的所有角点坐标进行量度,量度结果记入表3-1中。在全部角点量度完成之后,将这些角点坐标值按照顺序代入公式(3-1),就可以计算出桂林市城区的面积。
表3-1 桂林市TM影像城市多边形区域角点坐标测算表
续表
图3-2 桂林市TM5、TM4和TM3波段假彩色合成增强影像图
据此,计算其南北向和东西向长度(结果用千米表示)及区域的面积(结果用平方千米表示)。多边形面积(S)计算公式为
遥感地质学实验教程
(6)运用ENVl的影像测量工具(Measurement Tool)进行面积测量。
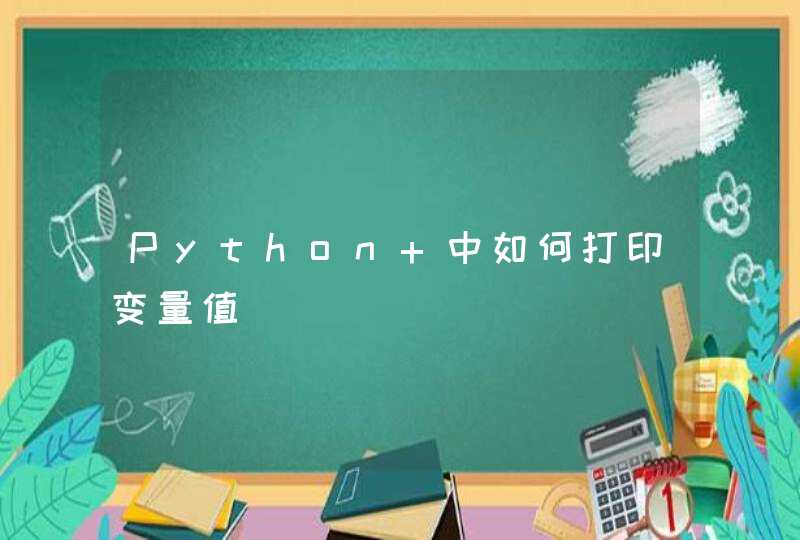
1)在主窗口上方菜单下选择“Tools>MeasurementTool”,出现“Display Measurement Tool”对话框。在“Display”文本框内,输入想测量的显示号。选择适当的图像窗口切换按钮,包括主窗口(Image)、滚动窗口(Scroll)、缩放窗口(Zoom),要在任何时间禁用测量功能,选择【Off】切换按钮,如图3-3所示。
图3-3 显示测量工具对话框
2)选择“Type>所需测量的区域形状”。其中,Polygon为多边形;Polyline为折线;Rectangle为矩形;Ellipse为椭圆。在图像显示内,通过用鼠标左键点击,绘制所需要的形状。通过点击鼠标右键,闭合多边形或完成线段。要删除形状,再次点击鼠标右键。
◎对于多边形模式,顶点间的距离被列出,当多边形闭合时,周长和总面积被记录。
◎对于折线模式,列出了顶点间的距离,当折线完成时,给出总距离。
◎对于矩形或椭圆模式,用鼠标左键点击并拖曳到所需要的形状大小。如需要绘制一个正方形或圆,在矩形或椭圆模式下,按住鼠标中键的同时,点击并拖曳。
3)选择“Units>所需测量单位”。若图像的像元大小没有保存在文件头中,当出现“Input Display Pixel Size”对话框时,选择除“Pixel”之外的任何单位,在“X Pixel Size”和“Y Pixel Size”文本框中,输入图像的像元大小(注:TM 像元尺寸为30m ×30m)。
4)保存测量信息。在“Display Measurement Tool”对话框内使用“File”菜单(图3-3),选择“File>Save Points to ASCII”,在“OutputMeasurement Directory”对话框内,输入一个输出文件名。点击【OK】按钮,把测量信息保存到一个ASCII文件,格式为txt。
六、实验报告
(1)简述实验过程。
(2)回答问题:①通过本次实验观察到的事实,说明遥感数字图像模型的构成。②执行“Coursor Location/Value”操作可以得到遥感数字图像的哪些技术参数?Location操作框中显示的数值单位是什么?③比较用手工量度加公式(3-1)测算的市区面积和用ENVI影像测量工具(Measurement Tool)测算的市区面积,对两者测量的一致性和差异进行简单分析。④可以通过对TM 影像像元坐标的量度,就能粗略计算出地物间的距离和面积,而不必依赖于地理坐标,为什么?
实验报告格式见附录一。