


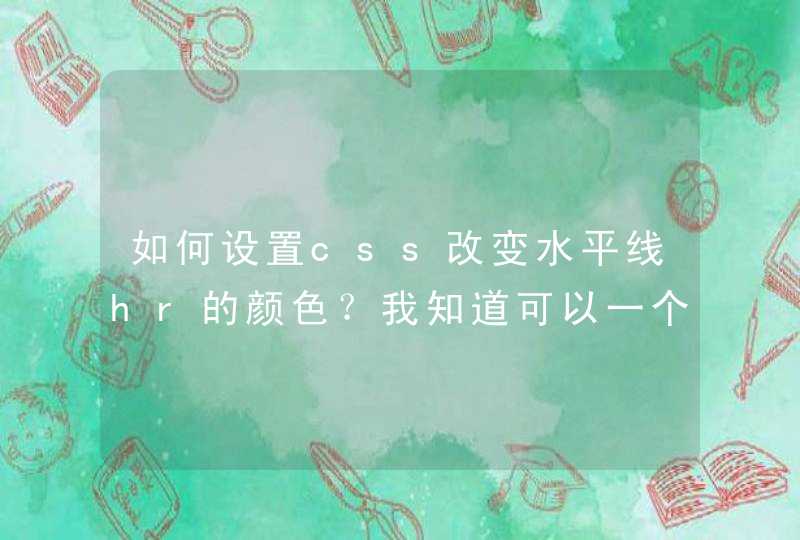













1、首先,在电脑上打开AI软件,再在打开的软件左侧的工具中点击选择矩形工具,从而画出一个直角的矩形。
2、2、然后,在左侧工具中点击直接选择工具,选中右侧的直角矩形图。
3、3、接着,分别移动鼠标到直角矩形中的4个点上,再按住鼠标左键来移动直接选择工具,使四个直角拉圆。
4、4、另外,若是只需要拉一个直角的圆角,可以用直接选择工具选中需要拉成圆角的直角点。
5、5、最后,按照第三步的操作去操作即可。
像大黄蜂、擎天柱一般有智慧能思考的“汽车人”成为汽车智能化发展的目标与方向。当前,行业内各大车企也在纷纷努力给汽车注入更多智能基因,不断向自动驾驶迈进,但囿于技术限制,大多数智能汽车都还处于感知智能阶段,无法完全实现安全自动驾驶,因为当人工智能算法对相应的驾驶数据信息进行判断时,会因数据库不完整而难以做出正确抉择,进而导致判断失误,出现安全问题。
那么,面对复杂的自动驾驶场景,长城汽车的底气又从何而来呢?
能思考会学习 实现每一种场景中的准确判断
想要真正实现安全的自动驾驶,汽车需要具备更高阶的认知智能,具备学习、思考和判断等认知能力,能够在驾驶过程中随机应变,除了需要解决车的环境感知、信息融合、路线规划等问题,还需要具备对随时变化的交通环境数据进行推断的功能,从而能够在各种复杂场景中做出快速科学的驾驶判断。
为此,长城汽车针对中国特色的复杂交通状况,通过知识图谱的方式,首创以CSS模型为核心的双认知智能模型,可理解为协同场景安全认知智能模型。这个模型具有思考和学习的能力,不仅可以适应环境,还可以将用户的每一次路况难题记录下来,然后形成大量经验,并将经验总结成了一些公理,再通过专家系统、模式匹配等应用实例找到这些问题的解决办法,成为具有认知智能的AI,在下一次遇到类似问题时自动判别,找到与问题相对应的解决办法。
目前CSS模型总结出的公理包括在事故多发场景下保持警惕,提前规避,避免出现在其他交通参与者的感知盲区等,主动和其他交通参与者交互表达自身驾驶意图,在车辆能力下降时采用谨慎的驾驶策略,让速不让道等,大幅提升了复杂交通状况下自动驾驶的安全性。
数十万复杂场景积累 保障每一次自动驾驶的安全
为了保障自动驾驶在每一个场景中的科学判断,CSS模型采用专家库方式来定义自动驾驶场景,并结合了场景安全因子,应用数据驱动的方式来解决自动驾驶的规控问题,目前在专家库方面,长城汽车已经积累了数十万个典型的自动驾驶场景,覆盖自动驾驶过程中“高速主路-城市开放路-城市快速路-上下匝道-路口”全路形行驶,在不同的交通场景下,均能执行可靠的自动驾驶策略动作,如行人礼让,自动变道等。
值得一提的是,长城汽车CSS模型专家库所积累的海量自动驾驶场景中,大部分是通常所说的自动驾驶“绊脚石”——CONER CASE,也就是不同于常规驾驶场景的复杂边角场景,例如,一个人带着一条狗在高速公路上跑、一匹马车在车流中穿梭等,而当前的AI在面对以上没有学习过的特殊场景时便会表现得束手无策,造成安全问题。CSS模型采用了传统深度学习和增强学习双核心技术,掌握海量边边角角的场景的同时还能实现一些个性化的自生长场景,并科学匹配相应驾驶模式,对于一些没有遇到过的CONER CASE,还能根据专家库挖掘出与之匹配的模式,有效解决自动驾驶应用于复杂场景的驾驶问题,高效助力真正自动驾驶时代到来。
CSS双认知智能模型构建了长城汽车咖啡智驾认知智能的基础根基。作为咖啡智能2.0中的重要一环,咖啡智驾与全新电子电气架构、智慧线控底盘、智能座舱等智能化杀手锏的完美配合,使汽车成为有思想、个性化、可成长的智慧出行伙伴。相信随着长城汽车在智能化领域的不断投入与发展,咖啡智能将实现快速突破,加速长城汽车向全球化智能科技公司转型,而“汽车人”的梦想场景也终将走入我们的生活。