













,第1张")
类型转换、类型断言、动态派发。iface,eface。
反射对象具有的方法:
编译优化:
内部实现:
实现 Context 接口有以下几个类型(空实现就忽略了):
互斥锁的控制逻辑:
设计思路:
(以上为写被读阻塞,下面是读被写阻塞)
总结,读写锁的设计还是非常巧妙的:
设计思路:
WaitGroup 有三个暴露的函数:
部件:
设计思路:
结构:
Once 只暴露了一个方法:
实现:
三个关键点:
细节:
让多协程任务的开始执行时间可控(按顺序或归一)。(Context 是控制结束时间)
设计思路: 通过一个锁和内置的 notifyList 队列实现,Wait() 会生成票据,并将等待协程信息加入链表中,等待控制协程中发送信号通知一个(Signal())或所有(Boardcast())等待者(内部实现是通过票据通知的)来控制协程解除阻塞。
暴露四个函数:
实现细节:
部件:
包: golang.org/x/sync/errgroup
作用:开启 func() error 函数签名的协程,在同 Group 下协程并发执行过程并收集首次 err 错误。通过 Context 的传入,还可以控制在首次 err 出现时就终止组内各协程。
设计思路:
结构:
暴露的方法:
实现细节:
注意问题:
包: "golang.org/x/sync/semaphore"
作用:排队借资源(如钱,有借有还)的一种场景。此包相当于对底层信号量的一种暴露。
设计思路:有一定数量的资源 Weight,每一个 waiter 携带一个 channel 和要借的数量 n。通过队列排队执行借贷。
结构:
暴露方法:
细节:
部件:
细节:
包: "golang.org/x/sync/singleflight"
作用:防击穿。瞬时的相同请求只调用一次,response 被所有相同请求共享。
设计思路:按请求的 key 分组(一个 *call 是一个组,用 map 映射存储组),每个组只进行一次访问,组内每个协程会获得对应结果的一个拷贝。
结构:
逻辑:
细节:
部件:
如有错误,请批评指正。
在前一小节中介绍了点亮第一个LED灯,这里我们准备进阶尝试下,输出第一段PWM波形。(PWM也就是脉宽调制,一种可调占空比的技术,得到的效果就是:如果用示波器测量引脚会发现有方波输出,而且高电平、低电平的时间是可调的。)
这里爪爪熊准备写成一个golang的库,并开源到github上,后续更新将直接更新到github中,如果你有兴趣可以和我联系。 github.com/dpawsbear/bear_rpi_go
我在很多的教程中都看到说树莓派的PWM(硬件)只有一个GPIO能够输出,就是 GPIO1 。这可是不小的打击,因为我想使用至少四个 PWM ,还是不死心,想通过硬件手册上找寻蛛丝马迹,看看究竟怎么回事。
手册上找寻东西稍等下讲述,这里先提供一种方法测试 树莓派3B 的 PWM 方法:用指令控制硬件PWM。
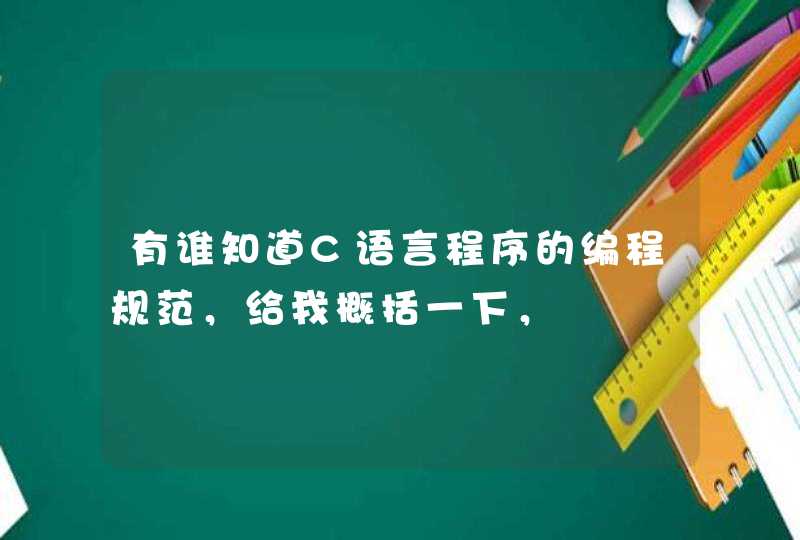
这里通过指令的方式掌握了基本的pwm设置技巧,决定去翻一下手册看看到底PWM怎么回事,这里因为没有 BCM2837 的手册,根据之前文章引用官网所说, BCM2835 和 BCM2837 应该是一样的。这里我们直接翻阅 BCM2835 的手册,直接找到 PWM 章节。找到了如下图:
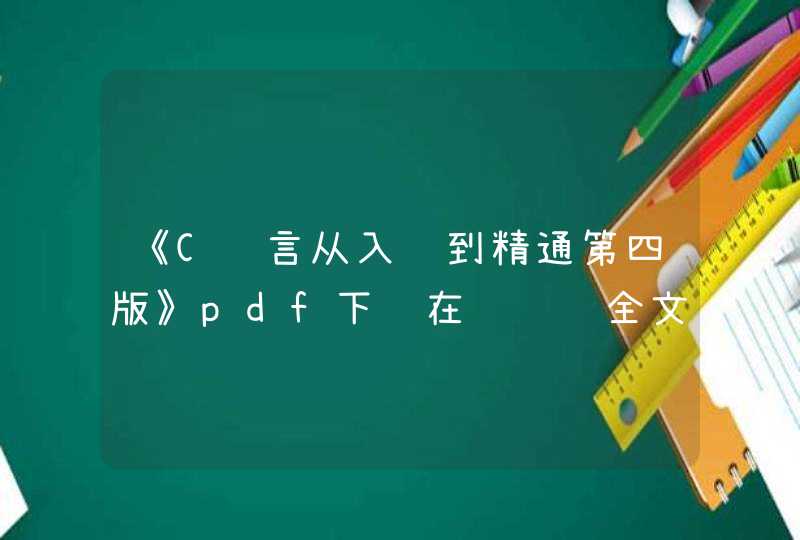
图中可以看到在博通的命名规则中 GPIO 12、13、18、19、40、41、45、52、53 均可以作为PWM输出。但是只有两路PWM0 PWM1。根据我之前所学知识,不出意外应该是PWM0 和 PWM1可以输出不一样的占空比,但是频率应该是一样的。因为没有示波器,暂时不好测试。先找到下面对应图:
根据以上两个图对比可以发现如下规律:
对照上面的表可以看出从 BCM2837 中印出来的能够使用在PWM上的就这几个了。
为了验证个人猜想是否正确,这里先直接使用指令的模式,模拟配置下是否能够正常输出。
通过上面一系列指令模拟发现,(GPIO1、GPIO26)、(GPIO23、GPIO24)是绑定在一起的,调节任意一个,另外一个也会发生变化。也即是PWM0、PWM1虽然输出了两路,可以理解成两路其实都是连在一个输出口上。这里由于没有示波器或者逻辑分析仪这类设备(仅有一个LED灯),所以测试很简陋,下一步是使用示波器这类东西对频率以及信号稳定性进行下测试。
小节:树莓派具有四路硬件输出PWM能力,但是四路中只能输出两个独立(占空比独立)的PWM,同时四路输出的频率均是恒定的。
上面大概了解清楚了树莓派3B的PWM结构,接下来就是探究如何使用Go语言进行设置。
因为拿到了手册,这里我想直接操作寄存器的方式进行设置,也是顺便学习下Go语言处理寄存器的过程。首先需要拿到pwm 系列寄存器的基地址,但是翻了一圈手册,发现只有偏移,没有找到基地址。
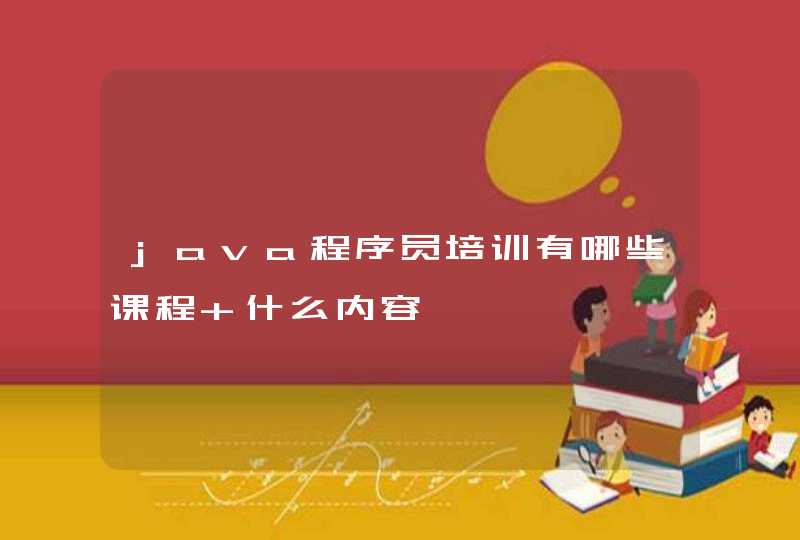
经过了一段时间的努力后,决定写一个 树莓派3B golang包开源放在github上,只需要写相关程序进行调用就可以了,以下是相关demo(pwm)(在GPIO.12 上输出PWM波,放上LED灯会有呼吸灯的效果,具体多少频率还没有进行测试)
以下是demo(pwm) 源码
1. 部署简单Go
编译生成的是一个静态可执行文件,除了glibc外没有其他外部依赖。这让部署变得异常方便:目标机器上只需要一个基础的系统和必要的管理、监控工具,完全不需要操心应用所需的各种包、库的依赖关系,大大减轻了维护的负担。
2. 并发性好
Goroutine和channel使得编写高并发的服务端软件变得相当容易,很多情况下完全不需要考虑锁机制以及由此带来的各种问题。单个Go应用也能有效的利用多个CPU核,并行执行的性能好。
3. 良好的语言设计
从学术的角度讲Go语言其实非常平庸,不支持许多高级的语言特性但从工程的角度讲,Go的设计是非常优秀的:规范足够简单灵活,有其他语言基础的程序员都能迅速上手。更重要的是
Go 自带完善的工具链,大大提高了团队协作的一致性。
4. 执行性能好
虽然不如 C 和 Java,但相比于其他编程语言,其执行性能还是很好的,适合编写一些瓶颈业务,内存占用也非常省。