











golang 内存分析,第1张")
Golang中也实现了内存分配器,原理与tcmalloc类似,简单的说就是维护一块大的全局内存,每个线程(Golang中为P)维护一块小的私有内存,私有内存不足再从全局申请。另外,内存分配与GC(垃圾回收)关系密切,所以了解GC前有必要了解内存分配的原理。
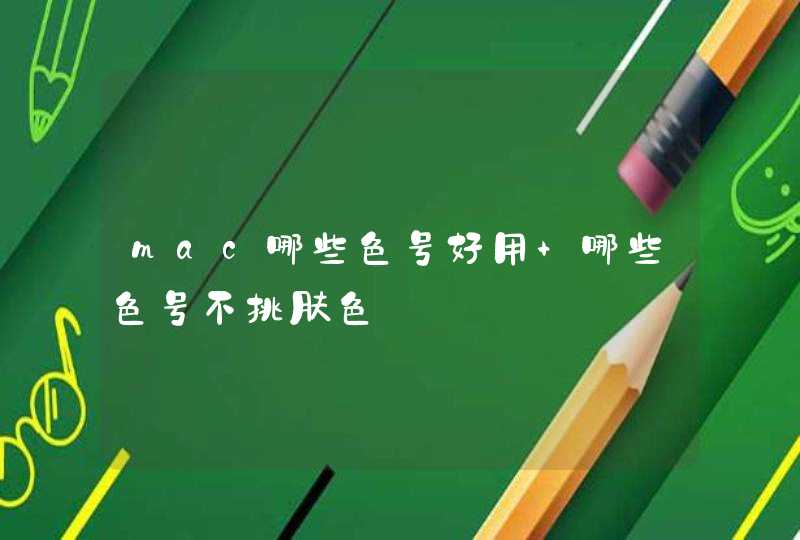
为了方便自主管理内存,做法便是先向系统申请一块内存,然后将内存切割成小块,通过一定的内存分配算法管理内存。 以64位系统为例,Golang程序启动时会向系统申请的内存如下图所示:
预申请的内存划分为spans、bitmap、arena三部分。其中arena即为所谓的堆区,应用中需要的内存从这里分配。其中spans和bitmap是为了管理arena区而存在的。
arena的大小为512G,为了方便管理把arena区域划分成一个个的page,每个page为8KB,一共有512GB/8KB个页;
spans区域存放span的指针,每个指针对应一个page,所以span区域的大小为(512GB/8KB)乘以指针大小8byte = 512M
bitmap区域大小也是通过arena计算出来,不过主要用于GC。
span是用于管理arena页的关键数据结构,每个span中包含1个或多个连续页,为了满足小对象分配,span中的一页会划分更小的粒度,而对于大对象比如超过页大小,则通过多页实现。
根据对象大小,划分了一系列class,每个class都代表一个固定大小的对象,以及每个span的大小。如下表所示:
上表中每列含义如下:
class: class ID,每个span结构中都有一个class ID, 表示该span可处理的对象类型
bytes/obj:该class代表对象的字节数
bytes/span:每个span占用堆的字节数,也即页数乘以页大小
objects: 每个span可分配的对象个数,也即(bytes/spans)/(bytes/obj)waste
bytes: 每个span产生的内存碎片,也即(bytes/spans)%(bytes/obj)上表可见最大的对象是32K大小,超过32K大小的由特殊的class表示,该class ID为0,每个class只包含一个对象。
span是内存管理的基本单位,每个span用于管理特定的class对象, 跟据对象大小,span将一个或多个页拆分成多个块进行管理。src/runtime/mheap.go:mspan定义了其数据结构:
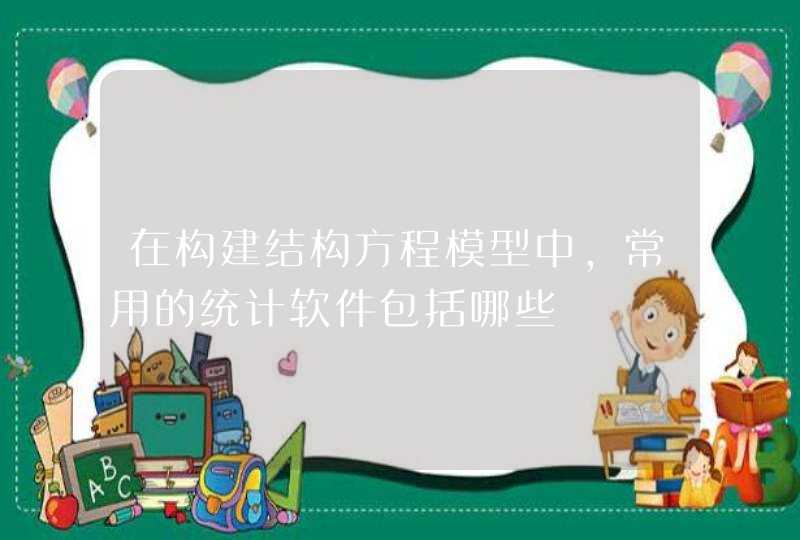
以class 10为例,span和管理的内存如下图所示:
spanclass为10,参照class表可得出npages=1,nelems=56,elemsize为144。其中startAddr是在span初始化时就指定了某个页的地址。allocBits指向一个位图,每位代表一个块是否被分配,本例中有两个块已经被分配,其allocCount也为2。next和prev用于将多个span链接起来,这有利于管理多个span,接下来会进行说明。
有了管理内存的基本单位span,还要有个数据结构来管理span,这个数据结构叫mcentral,各线程需要内存时从mcentral管理的span中申请内存,为了避免多线程申请内存时不断的加锁,Golang为每个线程分配了span的缓存,这个缓存即是cache。src/runtime/mcache.go:mcache定义了cache的数据结构
alloc为mspan的指针数组,数组大小为class总数的2倍。数组中每个元素代表了一种class类型的span列表,每种class类型都有两组span列表,第一组列表中所表示的对象中包含了指针,第二组列表中所表示的对象不含有指针,这么做是为了提高GC扫描性能,对于不包含指针的span列表,没必要去扫描。根据对象是否包含指针,将对象分为noscan和scan两类,其中noscan代表没有指针,而scan则代表有指针,需要GC进行扫描。mcache和span的对应关系如下图所示:
mchache在初始化时是没有任何span的,在使用过程中会动态的从central中获取并缓存下来,跟据使用情况,每种class的span个数也不相同。上图所示,class 0的span数比class1的要多,说明本线程中分配的小对象要多一些。
cache作为线程的私有资源为单个线程服务,而central则是全局资源,为多个线程服务,当某个线程内存不足时会向central申请,当某个线程释放内存时又会回收进central。src/runtime/mcentral.go:mcentral定义了central数据结构:
lock: 线程间互斥锁,防止多线程读写冲突
spanclass : 每个mcentral管理着一组有相同class的span列表
nonempty: 指还有内存可用的span列表
empty: 指没有内存可用的span列表
nmalloc: 指累计分配的对象个数线程从central获取span步骤如下:
将span归还步骤如下:
从mcentral数据结构可见,每个mcentral对象只管理特定的class规格的span。事实上每种class都会对应一个mcentral,这个mcentral的集合存放于mheap数据结构中。src/runtime/mheap.go:mheap定义了heap的数据结构:
lock: 互斥锁
spans: 指向spans区域,用于映射span和page的关系
bitmap:bitmap的起始地址
arena_start: arena区域首地址
arena_used: 当前arena已使用区域的最大地址
central: 每种class对应的两个mcentral
从数据结构可见,mheap管理着全部的内存,事实上Golang就是通过一个mheap类型的全局变量进行内存管理的。mheap内存管理示意图如下:
系统预分配的内存分为spans、bitmap、arean三个区域,通过mheap管理起来。接下来看内存分配过程。
针对待分配对象的大小不同有不同的分配逻辑:
(0, 16B) 且不包含指针的对象: Tiny分配
(0, 16B) 包含指针的对象:正常分配
[16B, 32KB] : 正常分配
(32KB, -) : 大对象分配其中Tiny分配和大对象分配都属于内存管理的优化范畴,这里暂时仅关注一般的分配方法。
以申请size为n的内存为例,分配步骤如下:
Golang内存分配是个相当复杂的过程,其中还掺杂了GC的处理,这里仅仅对其关键数据结构进行了说明,了解其原理而又不至于深陷实现细节。1、Golang程序启动时申请一大块内存并划分成spans、bitmap、arena区域
2、arena区域按页划分成一个个小块。
3、span管理一个或多个页。
4、mcentral管理多个span供线程申请使用
5、mcache作为线程私有资源,资源来源于mcentral。
golang语言map的并发和排序
golang缺省的map不是thread safe的,如果存在读写并发的使用场景,必须在外面使用lock机制。
包sync里面引入一个安全map;
用法:
运行结果如下:
golang官方说法map并不排序,不按key排序,也不按插入顺序排序,也就是说map是无序的,无法保证任何排序。
下面是一种常见的给map排序输出的办法:
本文是对 Gopher 2017 中一个非常好的 Talk�: [Understanding Channel](GopherCon 2017: Kavya Joshi - Understanding Channels) 的学习笔记,希望能够通过对 channel 的关键特性的理解,进一步掌握其用法细节以及 Golang 语言设计哲学的管窥蠡测。
channel 是可以让一个 goroutine 发送特定值到另一个 gouroutine 的通信机制。
原生的 channel 是没有缓存的(unbuffered channel),可以用于 goroutine 之间实现同步。
关闭后不能再写入,可以读取直到 channel 中再没有数据,并返回元素类型的零值。
gopl/ch3/netcat3
首先从 channel 是怎么被创建的开始:
在 heap 上分配一个 hchan 类型的对象,并将其初始化,然后返回一个指向这个 hchan 对象的指针。
理解了 channel 的数据结构实现,现在转到 channel 的两个最基本方法: sends 和 receivces ,看一下以上的特性是如何体现在 sends 和 receives 中的:
假设发送方先启动,执行 ch <- task0 :
如此为 channel 带来了 goroutine-safe 的特性。
在这样的模型里, sender goroutine ->channel ->receiver goroutine 之间, hchan 是唯一的共享内存,而这个唯一的共享内存又通过 mutex 来确保 goroutine-safe ,所有在队列中的内容都只是副本。
这便是著名的 golang 并发原则的体现:
发送方 goroutine 会阻塞,暂停,并在收到 receive 后才恢复。
goroutine 是一种 用户态线程 , 由 Go runtime 创建并管理,而不是操作系统,比起操作系统线程来说,goroutine更加轻量。
Go runtime scheduler 负责将 goroutine 调度到操作系统线程上。
runtime scheduler 怎么将 goroutine 调度到操作系统线程上?
当阻塞发生时,一次 goroutine 上下文切换的全过程:
然而,被阻塞的 goroutine 怎么恢复过来?
阻塞发生时,调用 runtime sheduler 执行 gopark 之前,G1 会创建一个 sudog ,并将它存放在 hchan 的 sendq 中。 sudog 中便记录了即将被阻塞的 goroutine G1 ,以及它要发送的数据元素 task4 等等。
接收方 将通过这个 sudog 来恢复 G1
接收方 G2 接收数据, 并发出一个 receivce ,将 G1 置为 runnable :
同样的, 接收方 G2 会被阻塞,G2 会创建 sudoq ,存放在 recvq ,基本过程和发送方阻塞一样。
不同的是,发送方 G1如何恢复接收方 G2,这是一个非常神奇的实现。
理论上可以将 task 入队,然后恢复 G2, 但恢复 G2后,G2会做什么呢?
G2会将队列中的 task 复制出来,放到自己的 memory 中,基于这个思路,G1在这个时候,直接将 task 写到 G2的 stack memory 中!
这是违反常规的操作,理论上 goroutine 之间的 stack 是相互独立的,只有在运行时可以执行这样的操作。
这么做纯粹是出于性能优化的考虑,原来的步骤是:
优化后,相当于减少了 G2 获取锁并且执行 memcopy 的性能消耗。
channel 设计背后的思想可以理解为 simplicity 和 performance 之间权衡抉择,具体如下:
queue with a lock prefered to lock-free implementation:
比起完全 lock-free 的实现,使用锁的队列实现更简单,容易实现







![[R语言] Heatmap绘图经验总结](/aiimages/%5BR%E8%AF%AD%E8%A8%80%5D+Heatmap%E7%BB%98%E5%9B%BE%E7%BB%8F%E9%AA%8C%E6%80%BB%E7%BB%93.png)