















和论文: http://www.doc88.com/p-6099778647749.html 的启发和借鉴。
JPS(jump point search)算法实际上是对A 寻路算法的一个改进,即在扩展搜索节点时,提出了更优化的策略,A 在扩展节点时会把节点所有邻居都考虑进去,这样openlist中点的数量会很多,搜索效率较慢。JPS算法通过寻找跳点的方式,排除了大量不感兴趣的点,减少了openlist中搜索的点的数量,速度大大提高。
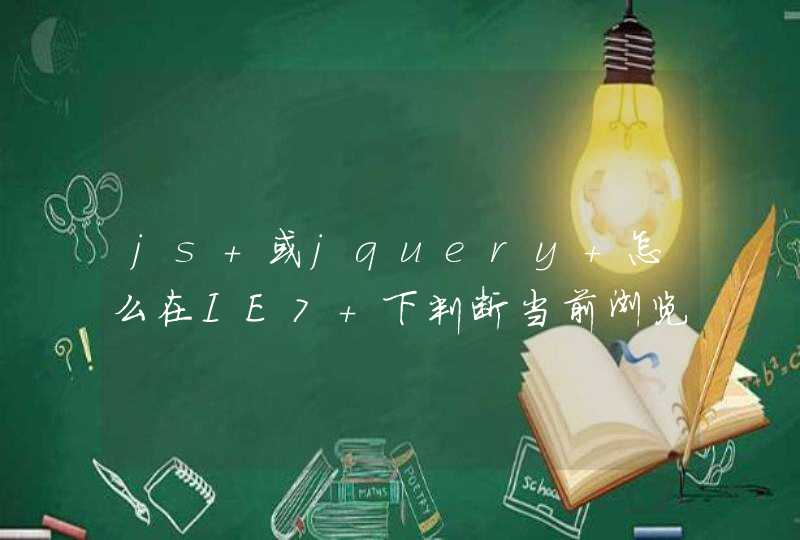
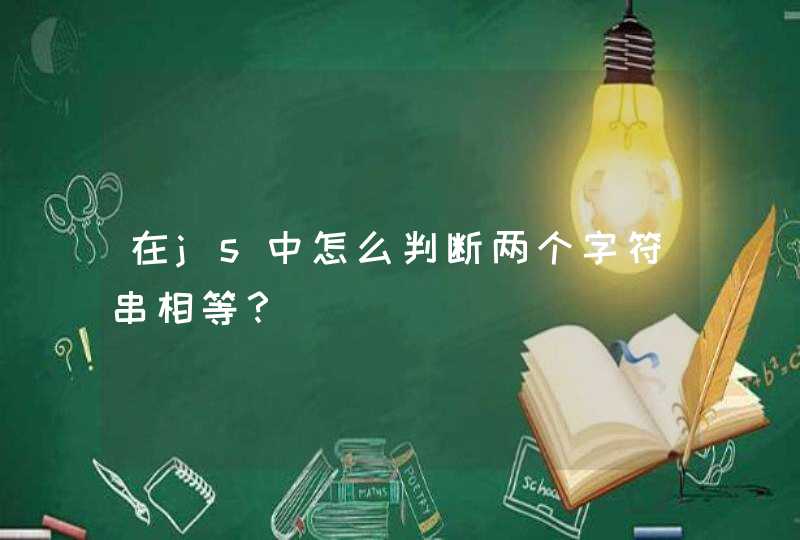
水平(垂直)搜索:如图右边部分描述,点1和4如果经过x到达,还不如从点p(x)到达,所以不用考虑点1,4,同理继续向右搜索时,点2,5和点3,6,都是类似的情况,直到遇到黑色的障碍,没有发现感兴趣的点,x处水平方向搜索完成,垂直方向搜索类似。如图左边部分描述,在点x处向右搜索至点y时,点y有一个强迫邻居(点7),因此y是从点x处沿水平方向搜索的一个跳点,需要将y加入到openlist中。水平搜索结束。
对角搜索:斜向搜索时,需要先在当前点的水平和垂直方向搜索一下,看能否找到感兴趣的点,如果找到,则将当前点加到openlist,结束斜向搜索,如果找不到,则继续斜向多走一步,继续,直到找到感兴趣的点或者斜向方向遇到障碍。
一条完整路线的搜索过程:
搜索算法:
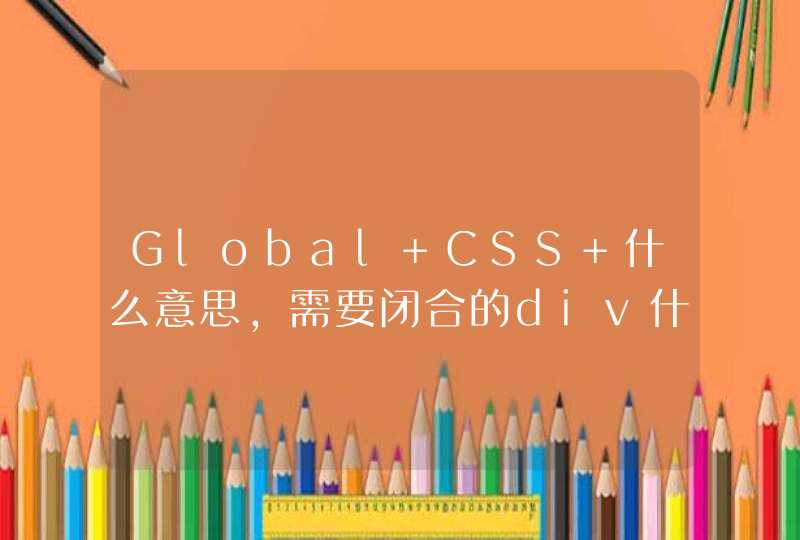
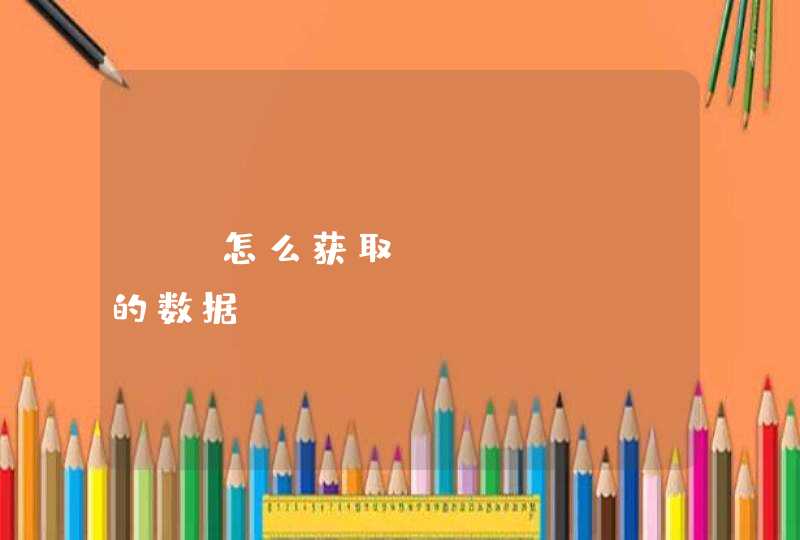
下面两张对比图,摘自上面的论文,可以看出,JPS算法实在优秀。
github链接
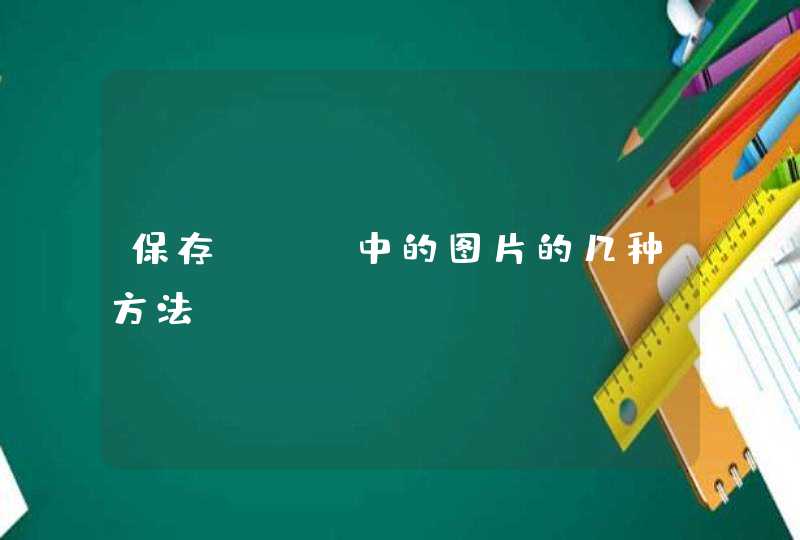
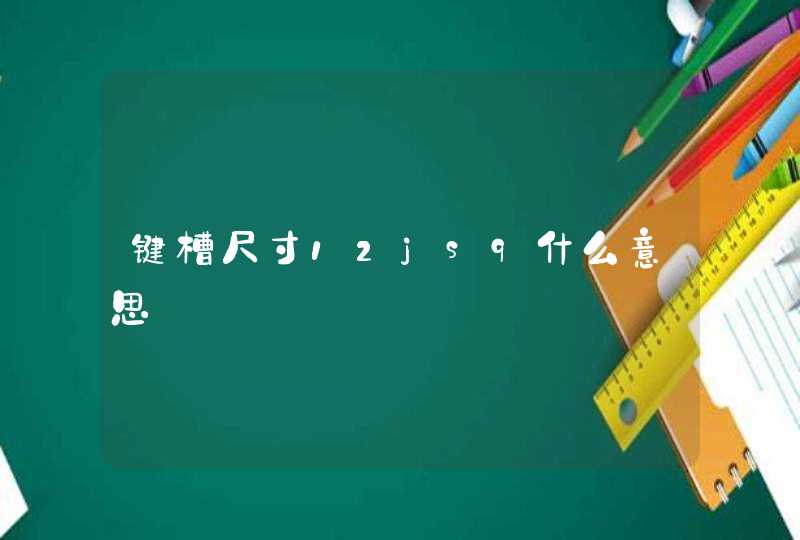
上图中红色块为节点x,基于前节点为P(x)的情况下的自然邻居节点。而被迫邻居则是图中绿色的方块(其对称情况未画出)。x被迫邻居包含三层隐藏含义:首先被迫邻居的位置是基于P(x)、x、阻挡块的相对关系定的,如第三个图所示,如果第三个图中,P(x)的位置在节点6的位置,那么绿色方块就不是x的被迫邻居了。其次,被迫邻居一点是考察非自然邻居的节点。最后被迫邻居一定是P(x)经过x到达才能取得最短路径的点。
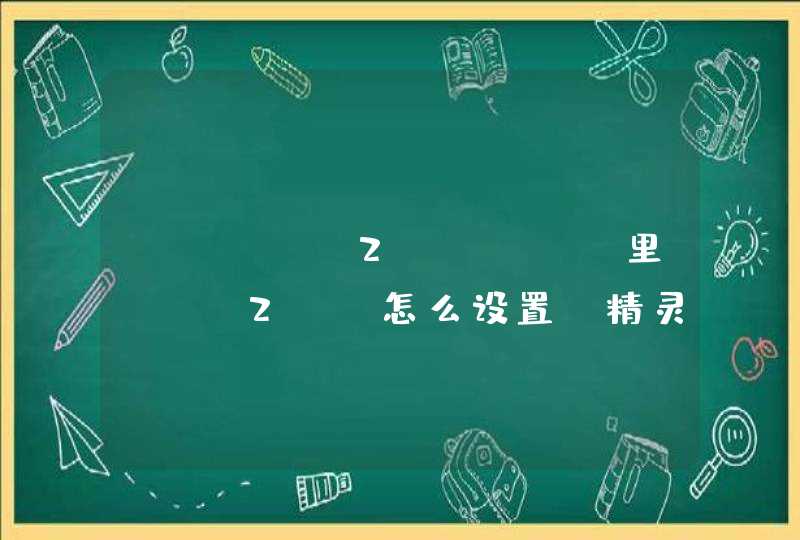
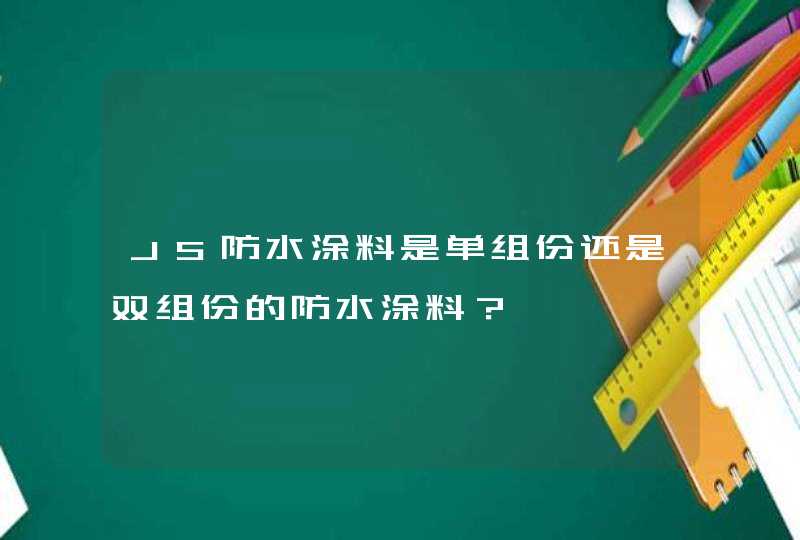
起点S,终点T,黑色块为阻挡黄色块为跳点,红色箭头是搜索方向,但是没有找到跳点,绿色箭头表示找到跳点。横坐标A-N,纵坐标1-10。
起始位置S,将A10加入openlist里,开始算法流程。
从openlist里取出代价最小的节点(现在为S),当前节点没有方向,所以需要搜索8个方向,只有右上方B9点是跳点。因为根据跳点定义iii,斜向搜索时,需要在两个分量方向查找跳点,右方是墙壁,略过,上方B8点有强迫邻居点C7,所以B8是跳点(根据跳点定义ii),所以B9是跳点。将B9加入openlist里。A10处理完后,将其从openlist中移除,加入closelist里。
从openlist中取出B9点,该点的父亲是S,所以搜索方向为右斜上,需要在右斜上,右方,上方搜索跳点,只有B8满足要求,将B8加入openlist。处理完B9点将其移到closelist。
从openlist取出B8点,该点搜索方向为上,B8有被邻居C7点,在斜上方搜索跳点,可以看出D8是C7的被迫邻居,所以C7是跳点,B8处继续向上搜索结束。
从openlist中取出C7点。需要搜索右上,右,上三个方向。水平搜索时发现被迫邻居D8,加入openlist。右上搜索时发现跳点G3(因其在上方搜索时发现具有被迫邻居节点的G2),将G3加入openlist。C7点处理结束。
取出G3点(为啥是G3,而不是D8点呢,因为从总代价来说G3比D8更小,总代价=已经走过的距离 + 估值,估值可采用曼哈顿距离或者高斯距离),需要搜索右上,右,上三个方向。向上搜索到跳点G2。
其余点路径在图上标注,就不再重复了。
(1) 若current方向是直线
i. 如果current左后方不可走且左方可走,则沿current左前方和左方寻找跳点。
ii. 如果current当前方向可走,则沿current方向寻找跳点。
iii. 如果current右后方不可走且右方可走,则沿current右前方和右方寻找跳点。
(2) 若current方向是斜线
i. 如果当前方向的水平分量可走,则沿current方向的水平分量方向寻找跳点。
ii. 如果当前方向可走,沿current方向寻找跳点。
iii. 如果当前方向的垂直分量可走,则沿current方向的垂直分量方向寻找跳点。
上述算法流程是建立在斜向不可穿过阻挡基础上。
这是一个近年来发现的高效寻路算法。不过有一个限制就是只能在规则的网格地图上寻路,而且图上的点或边不能带权重,也就是不能有复杂的地形,只支持平坦和障碍两种地形。其
思想就是跳过矩形平坦区域的大量对称路径,只寻找所谓的跳跃点,作为搜索的节点。这样做的好处是裁剪了矩形区域内大量的节点,使open
list中的节点数相对较少。要知道,通常启发式搜索算法如A*,大量时间耗费在对open
list的操作上。实现得好的A*算法会使用优先队列,甚至HOT(heap on top)来对操作进行优化。但当open
list中的节点过多,这些操作还是会变得很昂贵。不过JPS有个缺点是每生成一个节点,也就是要找到一个跳跃点,相比较A*算法,是比较昂贵的。幸好通
常来说,得到的收益更多些。所以,在适用的情况下,还是推荐使用JPS的。
具体的实现,主要有两部分。第一部分,从open list中取一个最佳节点,然后从几个特定方向展开搜索,把每个方向得到的跳跃点,加入open list里。第二部分,就是找到一个跳跃点。
对于起始点,可以向所有方向展开搜索。对于其他节点,要看父节点指向本节点的方向,向所有自然邻居和被迫邻居节点方向进行搜索。
例如下图的例子,对于节点n和父节点p和障碍x,+是n的自然邻居,也就是说从p到n到+是最佳路径。如果x不是障碍,从p到n到-不是最佳路径,因为从p到x到-最近。但是如果x是障碍,那么从p到n到-就是最佳路径了,所以这时候称-为被迫邻居。
- + +
x n +
p x -
以上是n和p对角的例子。还有种情况是n和p是直线:
x x -
p n +
x x -
搜
寻跳跃点是递归进行的。首先判断一个节点是否是跳跃点。如果这个点有被迫邻居,那么这个节点就是跳跃点。第二种情况,如果这个节点是目的地节点那么也当作
跳跃点。如果不是,那么就递归地沿本来方向继续搜寻下去。对于对角方向要额外多做两步,即先对其相应的(左右两个)直线方向进行搜索,如果找到跳跃点,就
把自身也当作跳跃点返回。如果直线没找到,那么就一样继续按对角方向递归寻找跳跃点,并返回那个跳跃点。
先看看leetcode上的几道题目,关键字 层序遍历 ,其实就是把一棵树一层一层地遍历,取出每一个节点。当然从根节点到叶子节点,从叶子节点到根节点,每层从左到右,从右到左……都可以衍生成不同的题目。
102. 二叉树的层序遍历
107. 二叉树的层序遍历 II
429. N 叉树的层序遍历
这一类的题目,被归纳在leetcode的 广度优先搜索 标签下
这一类的题目,总结起来可以套用模板来解决,我们需要借用一下数据结构的知识:
队列 :先进先出,后进后出
在JavaScript中,我们会使用 数组Array 来模拟队列:
先初始化一个 二叉树
先看看102的题目
解题:
从以上例子,只要步骤是:
有一个细节要注意:
这里用的是 pop() 和 unshift() ,是因为队列先进先出的特点,pop()从最后面弹出一个元素,unshift()把新元素放到最前面。 push() 和 shift() 搭配也有相同效果。
107的题目稍微改变了一下,要求输出是[[15,7], [9,20], [3]],可以看出,就是把102的从上到下输出每一层节点,改成从下到上输出,首先想到的就是把102的数组反转就可以了。
但是,我们可能直接在保存结果数组的时候处理一下:
102中,我们使用 push() 把每一层的节点放入结果数组
107中,结果数组和102的反转了,所以,我们可以把 push() 改成 unshift() 即可,最后得到的结果就是,树的要节点那层在结果数组的最后,叶子节点在最前面。
429题中把二叉树改成了N叉树,树的结构发生了变化
但是可以看到,和二叉树的数据结构相比,就是把left和right合成children,那么在我们的模板中,也只需要修改一下
改成
这样就可以得到结果了。
想一下,如果再改一下:如何从右到左遍历每一层节点?层数是单数时从左到右,层数是双数时从右到左?
再扩展一下,这个算法能做什么呢?
当我们玩游戏,特别是走迷宫之类的游戏,是不是会从一个点出发,然后判断下一步能不能走,直到找出终点?BFS也是寻路方案的基础。
推荐一下leetcode上的总结:
二叉树层序遍历登场:我要打十个!