










2、性能分析。由于网络中的客户不断的增加,网络资源也会渐渐由建网初期的空闲而变的拥塞。客户密度的分布不均,也会导致网络资源的利用不能像规划初期的模型一样,这时候就需要性能分析。工程师需要通过对网络中话务的分析,来合理的调配网络中的资源,同时要根据网络整体的资源利用率和网络话务的变化,来提出进一步的网络建设的方案。
3、道路测试。虽然建网初期网络中的基站数量较少,基站间的接续基本是处于一个相当固定的状态,但随着网络中基站的不断增加,同一段道路中的覆盖基站会变得很多,用户能否占用最合适的基站来进行通话会直接影响到用户的通话质量,而路测工程师的主要工作就是确保用户在道路上打电话时能够占用最佳的基站信号来进行呼叫。
目前常用的文本纠错框架有两种:(1) Pipeline的3段式:(a) 错误定位;。。。
(2) 基于Noise Channel Model的纠错。
什么是Noise Channel Model(噪声信道模型)?
参考: 噪声信道模型zz
重要!: 策略算法工程师之路-Query纠错算法
重要!: 平安寿险 AI 团队 | 文本纠错技术探索和实践
DVB数字电视常见信号指标解释1. 平均功率与峰值电平
峰值电平在模拟电视广播时用于表征频道信号电平强弱。
模拟电视信号是单极性、不对称的,即电视信号有一个固定黑色参考电平,比黑色亮的信号处在黑色电平线一边,同步脉冲处在另一边。单极性调制载波,有两种方式:①正极性调制指亮度增加时载波幅度增大,同步脉冲始终对应发射功率最小值;②负极性调制指亮度增加时载波幅度减小,同步脉冲对应发射功率最大值。负极性调制由于具有受干扰小等优点,我国和世界大多数国家都采用负极性调制。
测量模拟电视信号电平,使用频谱分析仪在规定带宽/300KHz对信号同步脉冲的峰值电平进行测量,并以此作为判别信号强弱的标准。因为这里集中了信号在频道内的主要能量(超过98%),所以可以认为对载波同步脉冲的测量可代表信号在测量频道内的电平值。
在工程维护过程中,国内通常使用模拟电视场强仪测量频道电平强弱,测量时场强仪的接收通道调谐于图像载波频率,场强仪的RBW带宽为300kHz,由于图像载波电平随图像内容的变化而变化,所以场强仪采用峰值保持采样的方法测量图像载波峰值电平,通过换算可近似表征频道电平的强弱。
平均功率在数字电视广播时用于表征频道信号功率强弱,也称信道功率,与模拟电视峰值电平概念和测量手段完全不同。
数字调制信号类似噪声,信号在调制到射频载波前被进行了随机化处理。一个数字载波信号,无论是否调制了数据,在频域观察时一般是相同的。而在频域中观察通常也说明不了调制方式是QPSK、16QAM、64QAM等,只能表征信号幅度、频率、平坦度、频谱再生等信息。由于数字信号以噪声形式出现,但它更像随机加入到频域测试设备中的一组组脉冲,所以采用平均功率判定信号强弱。数字电视信号平均功率不随调制内容的变化而变,平均功率和最大响应没有关系。
数字电视频道平均功率和带宽有关,带宽越宽信道平均功率越高。模拟电视场强仪只对RBW带宽300kHz内的窄带峰值信号进行采样,完全不能表征在宽带(如数字电视8MHz)内的能量,仅当该数字频道的带内平坦度相当好时可以近似换算。
为什么64QAM数字频道平均功率要调整为比模拟频道电平低10dB?
对于64QAM调制,通常建议其数字频道平均功率要调整为比同系统的模拟频道峰值电平低10dB;对于256QAM要低6dB。产生这样的要求,是基于两个原因:
① 数字信号抗干扰能力强,对载噪比要求比模拟信号低,所以数字电视信号可用比模拟信号低得多的幅度进行传送,这样每个数字频道的传送功率降低,整个通带内总传送功率就降低,干线放大器的总体输入功率就会降低,因此在同一个线路中可以传送比原来更多信号,更多内容。
② 另一个主要原因是:通常64QAM调制的数字频道,其频道内统计峰值电平比平均功率高约10dB,256QAM高约6dB。为避免放大器失真,产生互调干扰,干扰其他频道信号,需要使数字频道的峰值电平调整到同模拟频道的峰值电平相同大小的程度,这样64QAM数字频道平均功率同比模拟频道峰值电平就低10dB。
下面详细解释这个技术概念:
RF信号在传输过程中,可能出现超过平均功率的更高峰值电平,要想得到这些无规律的峰值幅度,必须对全部时间内的功率进行测量,以获得统计峰值电平,进而得到统计峰值电平和平均功率的比值,即峰值-平均值比。
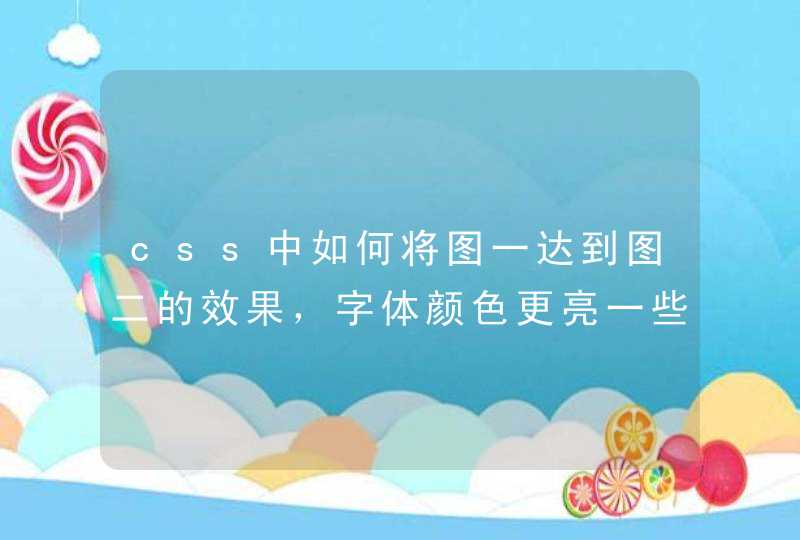
在有较低的峰值-平均值比的调制形式中,偶然的峰值电平只产生较低功率。因此即使出现偶然高幅度峰值电平,也不会产生紊乱的放大器互调失真,放大器不需要很多功率余量去接受这些高幅度的峰值电平。所以恒定幅度的调制包络信号,为提高输出功率放大器的工作效率,可以使放大器工作在接近饱和且在功率输出端不需要补偿的状态。由于信号功率是恒定的,功率会不断传送给负载,其峰值功率等于平均功率。对于功率不断变化的RF信号,其峰值功率与平均功率就不同。峰值-平均值比值越低,信号就越接近1dB压缩点的电平,在这个电平上能够驱动放大器且不会产生额外互调失真。对于有很大的峰值-平均值比的信号,为不产生额外失真,放大器要有很大余量去放大这些偶然的峰值信号。
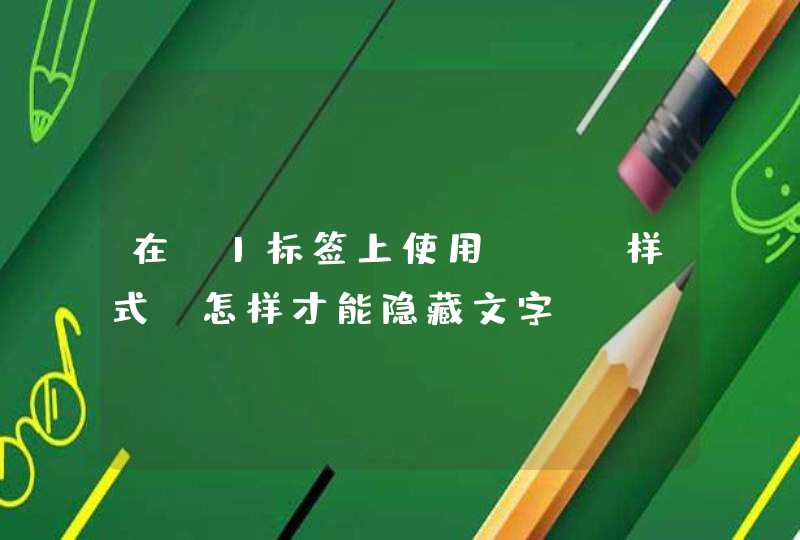
QAM调制的调制包络是非恒定幅度的,峰值的出现时间一般没有规律(QAM调制中峰值是由一个星座点到另一个星座点的调制偏移引起),一般使用在最大功率输出点补偿性能良好的线性放大器,这样放大器的功率余量大,工作效率会很低,但可以避免大量的频谱再生,大多数频谱再生是互调失真的另一种形式,会产生附加无用信号,对其他频道造成干扰。
图1 数字信号的峰值幅度和平均幅度
通常情况下,由于有线网络上放大器的工作状态是按照模拟频道的峰值电平选配和调整的,如果让数字频道的平均功率和模拟频道的峰值电平工作在相同电平值,那么数字信号的峰值电平信号在进入放大器时可能引起放大器失真,造成这些峰值信号的增益压缩,引起频谱再生,产生互调干扰产物,干扰其它频道的信号。所以通常建议数字频道平均功率要调整为比同系统的模拟频道峰值电平低10dB,对于256QAM要低6dB。
2. MER与BER的关系
调制误差率 (MER: Modulation Error Ratio)
在模拟电视中我们常使用C/N来表征信号质量,在数字电视中,MER是表征数字信号质量的最重要指标,它精确表明数字信号在调制和传输过程中所受到的损伤,也一定程度上说明该信号是否能被解调还原,以及解调还原后信号质量状况。
QAM调制信号从前端输出,经各级网络传输、入户,其MER指标会逐渐恶化,MER的经验门限值对于64QAM为23.5dB,对于256QAM为28.5dB,低于此值,星座图将无法锁定。另外对于网络不同部分的MER指标也存有一些经验值:64QAM时在前端要求>38dB,分前端>36dB,光节点>34dB,用户端>26dB。所以要求使用QAM分析仪对MER指标进行测量。
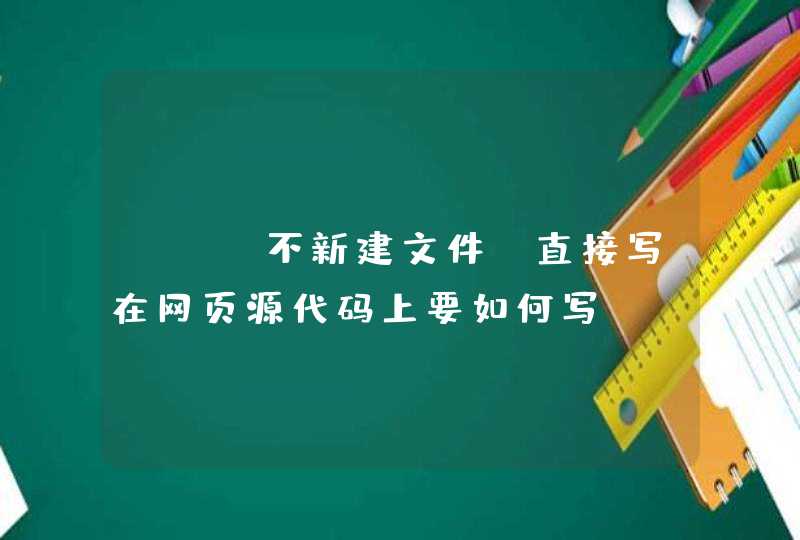
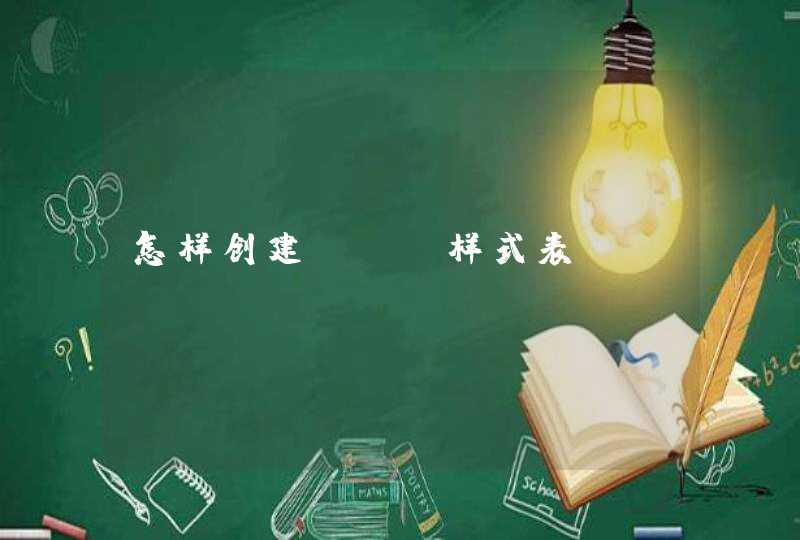
图2 MER的原理示意图
QAM分析仪首先对被测量数字调制信号进行高速采样,将采样到信号解调为不同相位格上的I和Q两个矢量信号,即相位、幅度信息,并将其矢量和位置点直观地描绘在星座图上,对于理想的I、Q信号,其矢量和位置点应位于星座图相应相位格的正中心,但实际信号与理想信号相比都有偏差,其矢量和位置点将会偏离相应相位格的中心位置,如果我们将I和Q定义为星座图中理想位置点的矢量数值,(δI,δQ)定义为实际信号与理想信号的误差矢量,即相位误差和幅度误差,就可计算出相应相位格中心位置点到实际符号位置点的距离,并按下式计算出MER的大小。下式中N是一段时间内捕获符号的点数,它一般比星座图中实际显示的点数多。
观察发现,在干扰小的时候MER变化缓慢,随着干扰的增大,当出现误码率时,MER变化很快。当MER指标出现偏差时,可直接观测星座图,不同的星座图显示表征了不同的干扰类型,了解干扰类型可直接查找出干扰源或故障设备所在。
比特误码率 (EER: Bit Error Rate)
BER(比特误码率)是发生误码的数据位数与传输数据总位数之比。
BER 通常以科学计数法表示,如误码率为3E-7,表示在10的7次方个传送位中有3 个误码,此比率通常采用一个较小时段内传送数据的分析结果来推估,越低的BER代表越好的信号质量。
BER(Pre-FEC)纠错前误码率:FEC纠错算法可以检测出的实际错误码数量。接收机可以通过纠错算法纠正其中的一部分误码,纠错前误码率就是实际发生错误的比特数和总传送比特数的比值。
BER(Post-FEC)纠错后误码率:FEC纠错算法根据自身的纠错能力,对接收到的部分错误码进行纠正后,无法被纠正的错误比特数与总传送比特数进行比较,得到纠错后误码率。
当信号质量很好的情况下,纠错前与纠错后的误码率数值是相同的,但有一定干扰存在的情况下,纠错前和纠错后的误码率就不同,纠错后误码率要更低。典型目标值为1E-09,对于数字电视而言,这时观看效果清晰、流畅;准无误码为BER为2E-04,偶然开始出现局部马赛克,还可以观看;临界BER为1E-03,大量马赛克出现,图像播放出现断续;BER大于1E-03完全不能观看。
尽管较差的BER 表示信号品质较差,但BER指标只具有参考价值,并不完全表征网络设备状况,因为BER 测量侦测并统计每个误码,问题可能是由瞬间的或突发噪声引起。
MER与BER之间的关系
MER是对叠加在数字调制信号上失真的对数测量结果,受多种因素影响,包括载噪比、突发脉冲、失真及IQ偏移量对信号造成的损伤。在数字调制信号中,突发脉冲、失真、IQ偏移量对信号造成的损伤十分相似。如果系统的MER减小,信号受到的损伤就会变大,出现误码的概率增加。
MER可为接收机对传输信号进行正确解码的能力提供一个早期预警。当信号质量降低时,MER将会减小。随着噪声和干扰的增大,MER逐渐降低,而BER仍保持不变,只有当干扰增加到一定程度,MER继续下降,BER才开始恶化。
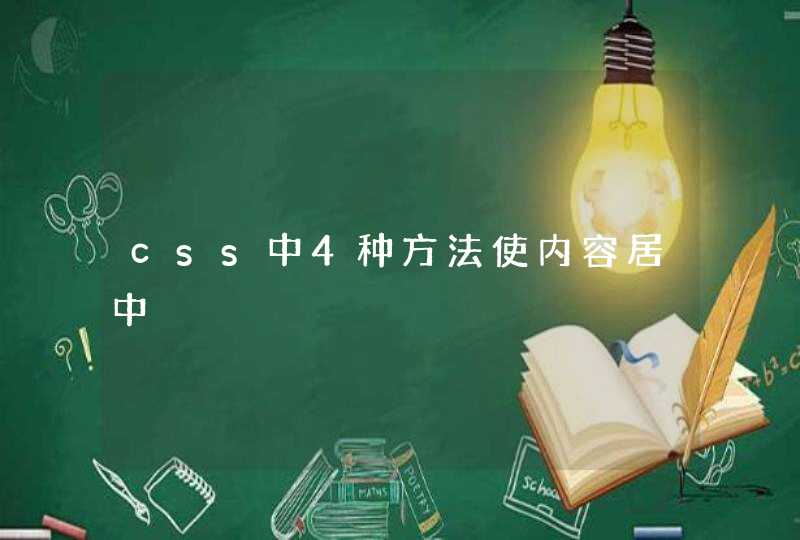
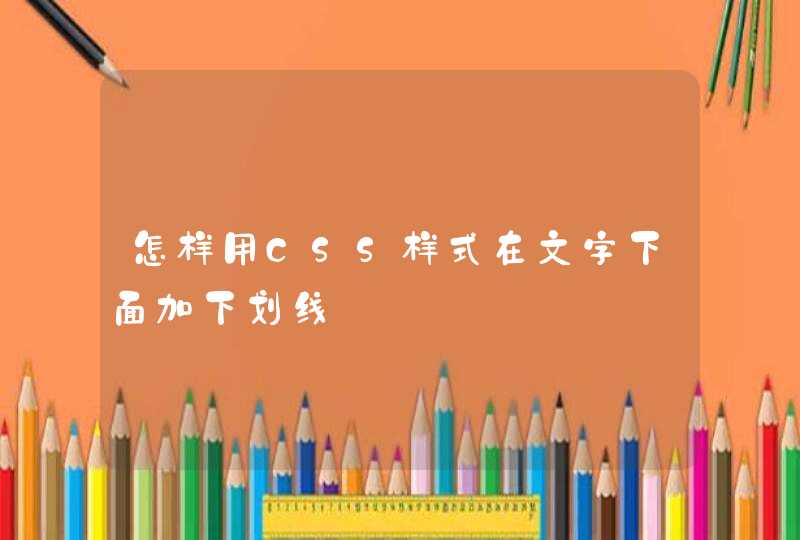
图3 干扰信号对MER、星座图和BER变化的影响
上图说明了MER、星座图和BER之间的相互关系。实际在一个星座图中是不会同时出现这几种情况的,这里是将四种不同情况综合在一起进行互相对比说明。第一个方框红色的点是MER的最佳状态,所有的点几乎都集中在理想位置,BER测量值很好;第二个方框绿色的点受到一些噪声干扰,干扰比较小,所以基本都环绕在理想中心位置周围,属于比较好的MER,BER仍不变;第三个方框的蓝色点受到的干扰比较大,各个点无规则的散落在方框内,这时MER的指标比较差;第四个方框受到很大的干扰,各个点不仅散落在本方框内,而且还有两个点已经离开本方框所划定的范围,BER恶化。
在第一、二、三方框中的信号有一个共同点,所有的点都落在了自己所在方框所划定的范围内,根据数字电视信号的判决规则,只要在判决范围内(方框内)就不会出现误码;只有第四个方框的点超出了划定的界限,这些点一旦进入其它星座点的范围就被判决为该星座点,这样就出现了误码。这说明为什么在一定干扰信号下MER的值在下降,却没有出现误码,直到MER下降到一定程度,才会出现误码,BER的数值开始恶化。
3. MER、S/N信噪比、C/N载噪比
MER与S/N
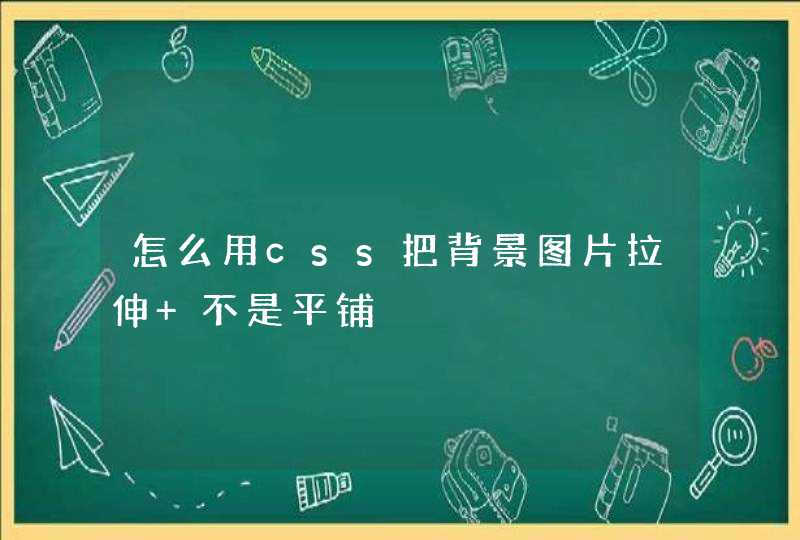
在理想状态下,如果信号中出现的有效损伤仅仅是高斯噪声,MER可被S/N信噪比表征,MER等于S/N。但实际应用中,由于传输信号不仅包括高斯噪声,还包括接收星座图上所有其它不可校正的损伤,包括网络传输中引入噪声,潜入调制信号中的幅度噪声、相位噪声、码间串扰和调制损伤等。所以简单地使用S/N来推算MER完全不可行。
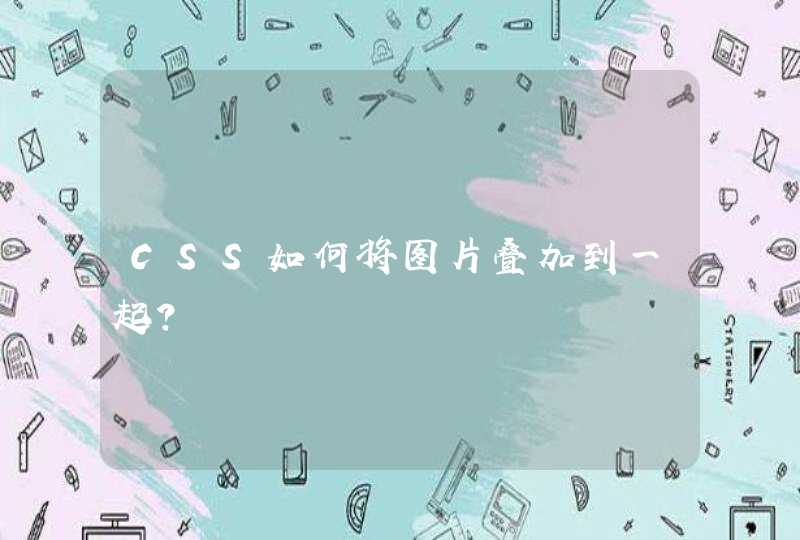
S/N应根据解调后的星座图数据进行测量。对于星座图中的每一符号,从其云状轨迹可以得出其统计分布。在去除正交失真、幅度不均匀、原点位移误差残留载波、非线性失真、相位抖动、连续波干扰的影响之后,剩余的云状轨迹才可以认为是由高斯噪声引起的,这剩余的云状轨迹也是计算信噪比的基础。
图4 不同失真参数之间的关系
C/N与S/N
信噪比(S/N)是指传输信号平均功率与加性噪声的平均功率之比,载噪比(C/N)指已经调制的信号平均功率与加性噪声平均功率之比,它们都以对数方式计算,单位dB。
信噪比与载噪比区别在于,载噪比中已调信号的功率包括传输信号功率和调制载波功率,而信噪比中仅包括传输信号功率。因此对同一个传输系统而言,载噪比要比信噪比大,两者之间相差一个载波功率。当然载波功率与传输信号功率相比通常是很小的,因而载噪比与信噪比在数值上十分接