




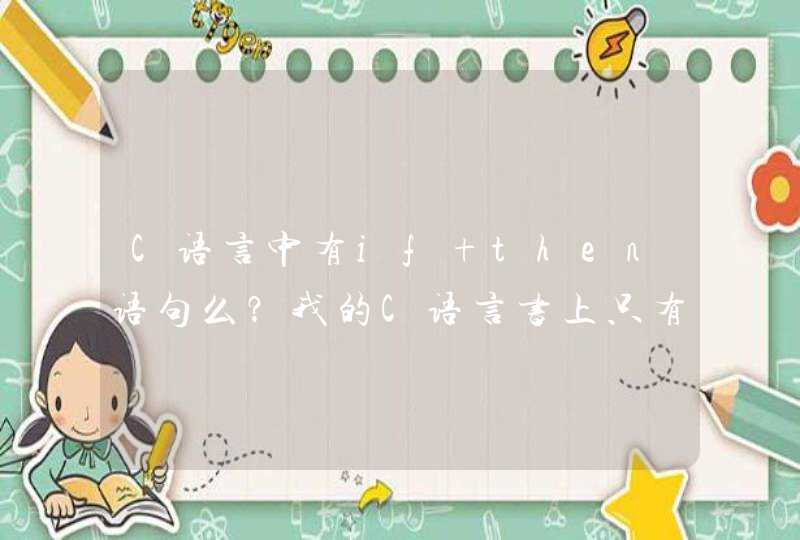









① 何为线性插值?
插值就是在两个数之间插入一个数,线性插值原理图如下:
② 各种插值法:
插值法的第一步都是相同的,计算目标图(dstImage)的坐标点对应原图(srcImage)中哪个坐标点来填充,计算公式为:
srcX = dstX * (srcWidth/dstWidth)
srcY = dstY * (srcHeight/dstHeight)
(dstX,dstY)表示目标图像的某个坐标点,(srcX,srcY)表示与之对应的原图像的坐标点。srcWidth/dstWidth 和 srcHeight/dstHeight 分别表示宽和高的放缩比。
那么问题来了,通过这个公式算出来的 srcX, scrY 有可能是小数,但是原图像坐标点是不存在小数的,都是整数,得想办法把它转换成整数才行。
不同插值法的区别就体现在 srcX, scrY 是小数时,怎么将其变成整数去取原图像中的像素值。
最近邻插值(Nearest-neighborInterpolation):看名字就很直白,四舍五入选取最接近的整数。这样的做法会导致像素变化不连续,在目标图像中产生锯齿边缘。
双线性插值(Bilinear Interpolation):双线性就是利用与坐标轴平行的两条直线去把小数坐标分解到相邻的四个整数坐标点。权重与距离成反比。
双三次插值(Bicubic Interpolation):与双线性插值类似,只不过用了相邻的16个点。但是需要注意的是,前面两种方法能保证两个方向的坐标权重和为1,但是双三次插值不能保证这点,所以可能出现像素值越界的情况,需要截断。
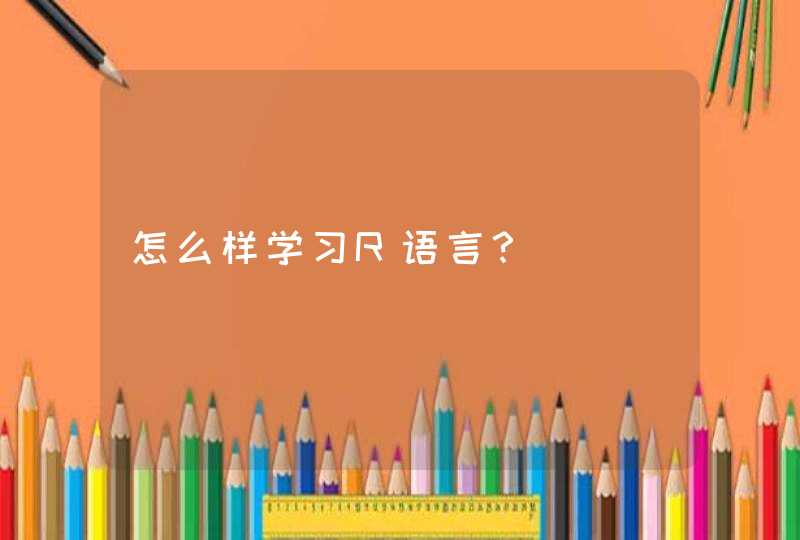
③ 双线性插值算法原理
假如我们想得到未知函数 f 在点 P = (x, y) 的值,假设我们已知函数 f 在 Q11 = (x1, y1)、Q12 = (x1, y2), Q21 = (x2, y1) 以及 Q22 = (x2, y2) 四个点的值。最常见的情况,f就是一个像素点的像素值。首先在 x 方向进行线性插值,然后再在 y 方向上进行线性插值,最终得到双线性插值的结果。
④ 举例说明
二. python实现灰度图像双线性插值算法:
灰度图像双线性插值放大缩小
import numpy as np
import math
import cv2
def double_linear(input_signal, zoom_multiples):
'''
双线性插值
:param input_signal: 输入图像
:param zoom_multiples: 放大倍数
:return: 双线性插值后的图像
'''
input_signal_cp = np.copy(input_signal) # 输入图像的副本
input_row, input_col = input_signal_cp.shape # 输入图像的尺寸(行、列)
# 输出图像的尺寸
output_row = int(input_row * zoom_multiples)
output_col = int(input_col * zoom_multiples)
output_signal = np.zeros((output_row, output_col)) # 输出图片
for i in range(output_row):
for j in range(output_col):
# 输出图片中坐标 (i,j)对应至输入图片中的最近的四个点点(x1,y1)(x2, y2),(x3, y3),(x4,y4)的均值
temp_x = i / output_row * input_row
temp_y = j / output_col * input_col
x1 = int(temp_x)
y1 = int(temp_y)
x2 = x1
y2 = y1 + 1
x3 = x1 + 1
y3 = y1
x4 = x1 + 1
y4 = y1 + 1
u = temp_x - x1
v = temp_y - y1
# 防止越界
if x4 >= input_row:
x4 = input_row - 1
x2 = x4
x1 = x4 - 1
x3 = x4 - 1
if y4 >= input_col:
y4 = input_col - 1
y3 = y4
y1 = y4 - 1
y2 = y4 - 1
# 插值
output_signal[i, j] = (1-u)*(1-v)*int(input_signal_cp[x1, y1]) + (1-u)*v*int(input_signal_cp[x2, y2]) + u*(1-v)*int(input_signal_cp[x3, y3]) + u*v*int(input_signal_cp[x4, y4])
return output_signal
# Read image
img = cv2.imread("../paojie_g.jpg",0).astype(np.float)
out = double_linear(img,2).astype(np.uint8)
# Save result
cv2.imshow("result", out)
cv2.imwrite("out.jpg", out)
cv2.waitKey(0)
cv2.destroyAllWindows()
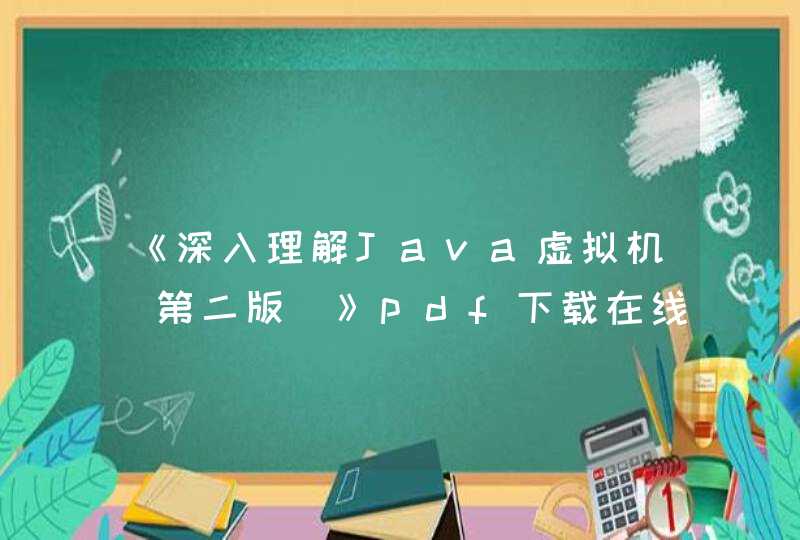
三. 灰度图像双线性插值实验结果:
四. 彩色图像双线性插值python实现
def BiLinear_interpolation(img,dstH,dstW):
scrH,scrW,_=img.shape
img=np.pad(img,((0,1),(0,1),(0,0)),'constant')
retimg=np.zeros((dstH,dstW,3),dtype=np.uint8)
for i in range(dstH-1):
for j in range(dstW-1):
scrx=(i+1)*(scrH/dstH)
scry=(j+1)*(scrW/dstW)
x=math.floor(scrx)
y=math.floor(scry)
u=scrx-x
v=scry-y
retimg[i,j]=(1-u)*(1-v)*img[x,y]+u*(1-v)*img[x+1,y]+(1-u)*v*img[x,y+1]+u*v*img[x+1,y+1]
return retimg
im_path='../paojie.jpg'
image=np.array(Image.open(im_path))
image2=BiLinear_interpolation(image,image.shape[0]*2,image.shape[1]*2)
image2=Image.fromarray(image2.astype('uint8')).convert('RGB')
image2.save('3.png')
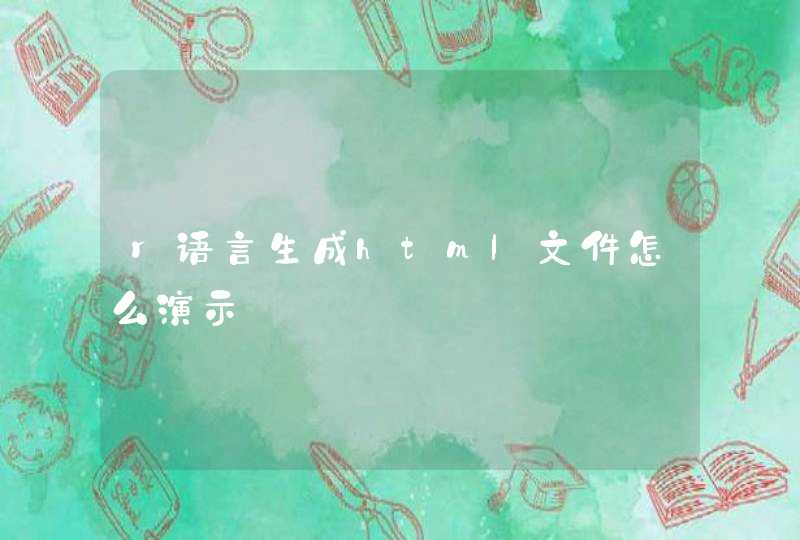
五. 彩色图像双线性插值实验结果:
六. 最近邻插值算法和双三次插值算法可参考:
① 最近邻插值算法: https://www.cnblogs.com/wojianxin/p/12515061.html
https://blog.csdn.net/Ibelievesunshine/article/details/104936006
② 双三次插值算法: https://www.cnblogs.com/wojianxin/p/12516762.html
https://blog.csdn.net/Ibelievesunshine/article/details/104942406
七. 参考内容:
https://www.cnblogs.com/wojianxin/p/12515061.html
https://blog.csdn.net/Ibelievesunshine/article/details/104939936
一些Python中的二维数组的操作方法这篇文章主要介绍了一些Python中的二维数组的操作方法,是Python学习当中的基础知识,需要的朋友可以参考下
需要在程序中使用二维数组,网上找到一种这样的用法:
#创建一个宽度为3,高度为4的数组
#[[0,0,0],
# [0,0,0],
# [0,0,0],
# [0,0,0]]
myList = [[0] * 3] * 4
但是当操作myList[0][1] = 1时,发现整个第二列都被赋值,变成
[[0,1,0],
[0,1,0],
[0,1,0],
[0,1,0]]
为什么...一时搞不懂,后面翻阅The Python Standard Library 找到答案
list * n—>n shallow copies of list concatenated, n个list的浅拷贝的连接
例:
>>>lists = [[]] * 3
>>>lists
[[], [], []]
>>>lists[0].append(3)
>>>lists
[[3], [3], [3]]
[[]]是一个含有一个空列表元素的列表,所以[[]]*3表示3个指向这个空列表元素的引用,修改任何
一个元素都会改变整个列表:
所以需要用另外一种方式进行创建多维数组,以免浅拷贝:
>>>lists = [[] for i in range(3)]
>>>lists[0].append(3)
>>>lists[1].append(5)
>>>lists[2].append(7)
>>>lists
[[3], [5], [7]]
之前的二维数组创建方式为:
myList = [([0] * 3) for i in range(4)]
首先需要创建数组才能对其进行其它操作。我们可以通过给array函数传递Python的序列对象创建数组,如果传递的是多层嵌套的序列,将创建多维数组(下例中的变量c):
>>>a = np.array([1, 2, 3, 4])
>>>b = np.array((5, 6, 7, 8))
>>>c = np.array([[1, 2, 3, 4],[4, 5, 6, 7], [7, 8, 9, 10]])
>>>b
array([5, 6, 7, 8])
>>>c
array([[1, 2, 3, 4],
[4, 5, 6, 7],
[7, 8, 9, 10]])
>>>c.dtype
dtype('int32')
数组的大小可以通过其shape属性获得:
>>>a.shape
(4,)
>>>c.shape