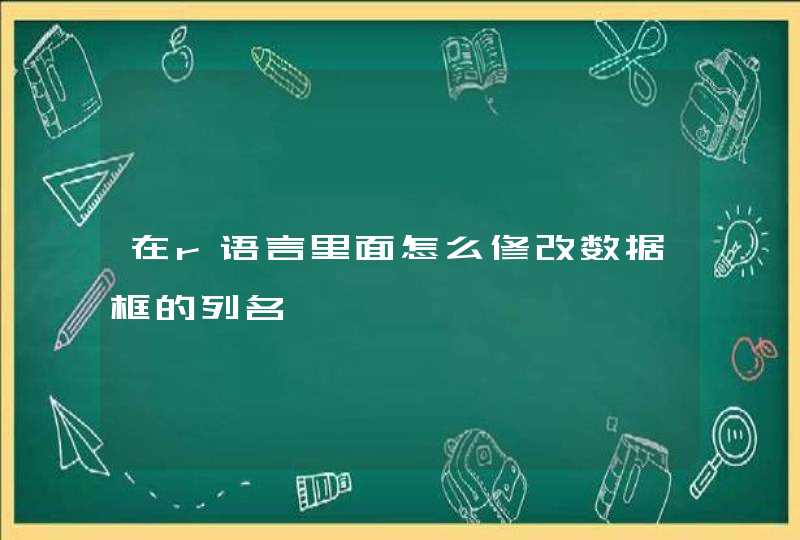



















golang 中 map的实现结构为: 哈希表 + 链表。 其中链表,作用是当发生hash冲突时,拉链法生成的结点。
可以看到, []bmap 是一个hash table, 每一个 bmap是我们常说的“桶”。 经过hash 函数计算出来相同的hash值, 放到相同的桶中。 一个 bmap中可以存放 8个 元素, 如果多出8个,则生成新的结点,尾接到队尾。
以上是只是静态文件 src/runtime/map.go 中的定义。 实际上编译期间会给它加料 ,动态地创建一个新的结构:
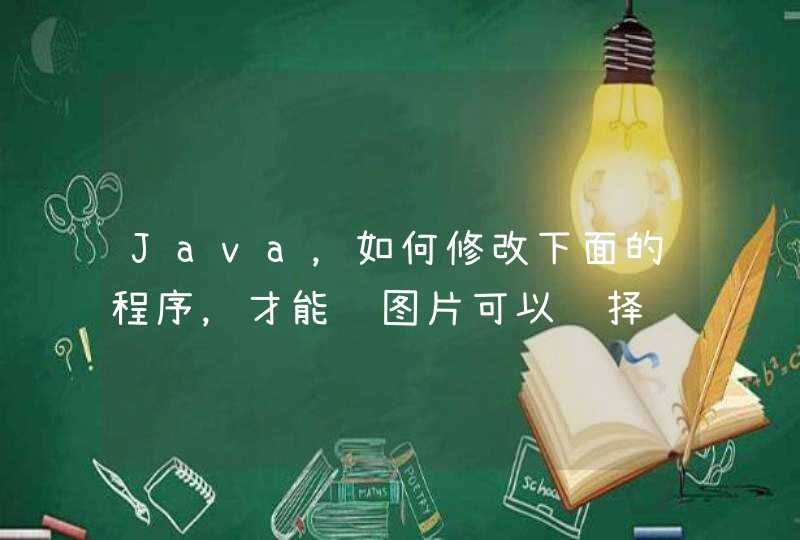
上图就是 bmap的内存模型, HOB Hash 指的就是 top hash。 注意到 key 和 value 是各自放在一起的,并不是 key/value/key/value/... 这样的形式。源码里说明这样的好处是在某些情况下可以省略掉 padding 字段,节省内存空间。
每个 bmap设计成 最多只能放 8 个 key-value 对 ,如果有第 9 个 key-value 落入当前的 bmap,那就需要再构建一个 bmap,通过 overflow 指针连接起来。
map创建方法:
我们实际上是通过调用的 makemap ,来创建map的。实际工作只是初始化了hmap中的各种字段,如:设置B的大小, 设置hash 种子 hash 0.
注意 :
makemap 返回是*hmap 指针, 即 map 是引用对象, 对map的操作会影响到结构体内部 。
使用方式
对应的是下面两种方法
map的key的类型,实现了自己的hash 方式。每种类型实现hash函数方式不一样。
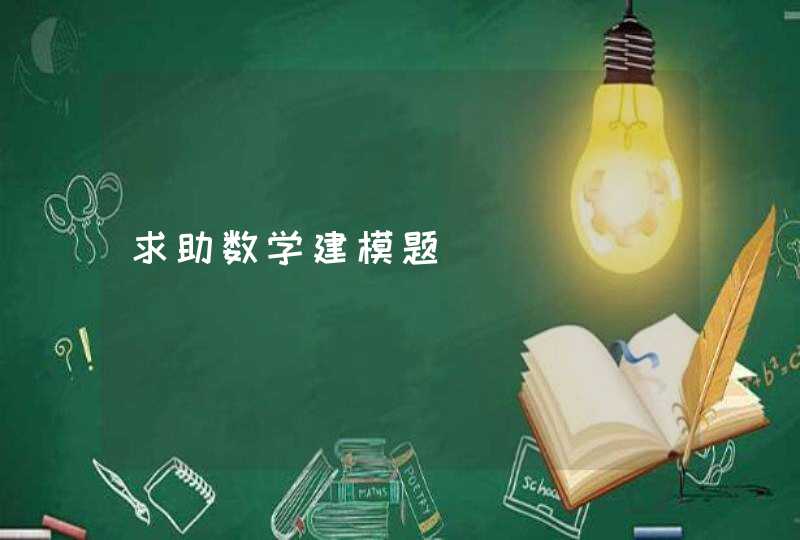
key 经过哈希计算后得到hash值,共 64 个 bit 位。 其中后B 个bit位置, 用来定位当前元素落在哪一个桶里, 高8个bit 为当前 hash 值的top hash。 实际上定位key的过程是一个双重循环的过程, 外层循环遍历 所有的overflow, 内层循环遍历 当前bmap 中的 8个元素 。
举例说明: 如果当前 B 的值为 5, 那么buckets 的长度 为 2^5 = 32。假设有个key 经过hash函数计算后,得到的hash结果为:
外层遍历bucket 中的链表
内层循环遍历 bmap中的8个 cell
建议先不看此部分内容,看完后续 修改 map中元素 ->扩容 操作后 再回头看此部分内容。
扩容前的数据:
等量扩容后的数据:
等量扩容后,查找方式和原本相同, 不多做赘述。
两倍扩容后的数据
两倍扩容后,oldbuckets 的元素,可能被分配成了两部分。查找顺序如下:
此处只分析 mapaccess1 ,。 mapaccess2 相比 mapaccess1 多添加了是否找到的bool值, 有兴趣可自行看一下。
使用方式:
步骤如下:
扩容条件 :
扩容的标识 : h.oldbuckets != nil
假设当前定位到了新的buckets的3号桶中,首先会判断oldbuckets中的对应的桶有没有被搬迁过。 如果搬迁过了,不需要看原来的桶了,直接遍历新的buckets的3号桶。
扩容前:
等量扩容结果
双倍扩容会将old buckets上的元素分配到x, y两个部key &1 <<B == 0 分配到x部分,key &1 <<B == 1 分配到y部分
注意: 当前只对双倍扩容描述, 等量扩容只是重新填充了一下元素, 相对位置没有改变。
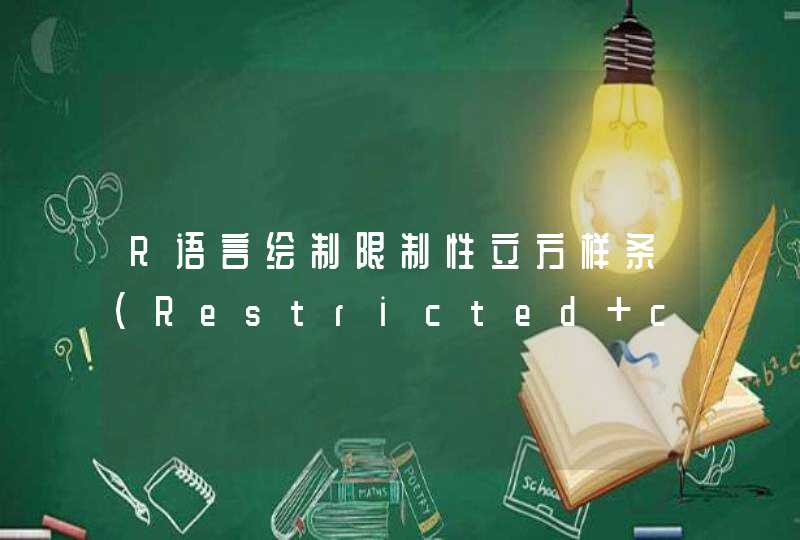
假设当前map 的B == 5,原本元素经过hash函数计算的 hash 值为:
因为双倍扩容之后 B = B + 1,此时B == 6。key &1 <<B == 1, 即 当前元素rehash到高位,新buckets中 y 部分. 否则 key &1 <<B == 0 则rehash到低位,即x 部分。
使用方式:
可以看到,每一遍历生成迭代器的时候,会随机选取一个bucket 以及 一个cell开始。 从前往后遍历,再次遍历到起始位置时,遍历完成。
https://www.qcrao.com/2019/05/22/dive-into-go-map/
https://draveness.me/golang/docs/part2-foundation/ch03-datastructure/golang-hashmap/
https://www.bilibili.com/video/BV1Q4411W7MR?spm_id_from=333.337.search-card.all.click
不知道你有没有听过这么一句:在使用 map 时尽量不要在 big map 中保存指针。好吧,你现在已经听过了:)为什么呢?原因在于 Go 语言的垃圾回收器会扫描标记 map 中的所有元素,GC 开销相当大,直接GG。
这两天在《Mastering Go》中看到 GC 这一章节里面对比 map 和 slice 在垃圾回收中的效率对比,书中只给出结论没有说明理由,这我是不能忍的,于是有了这篇学习笔记。扯那么多,Show Your Code
这是一个简单的测试程序,保存字符串的 map 和 保存整形的 map GC 的效率相差几十倍,是不是有同学会说明明保存的是 string 哪有指针?这个要说到 Go 语言中 string 的底层实现了,源码在 src/runtime/string.go里,可以看到 string 其实包含一个指向数据的指针和一个长度字段。注意这里的是否包含指针,包括底层的实现。
Go 语言的 GC 会递归遍历并标记所有可触达的对象,标记完成之后将所有没有引用的对象进行清理。扫描到指针就会往下接着寻找,一直到结束。
Go 语言中 map 是基于 数组和链表 的数据结构实现的,通过 优化的拉链法 解决哈希冲突,每个 bucket 可以保存 8 对键值,在 8 个键值对数据后面有一个 overflow 指针,因为桶中最多只能装 8 个键值对,如果有多余的键值对落到了当前桶,那么就需要再构建一个桶(称为溢出桶),通过 overflow 指针链接起来。
因为 overflow 指针的缘故,所以无论 map 保存的是什么,GC 的时候就会把所有的 bmap 扫描一遍,带来巨大的 GC 开销。官方 issues 就有关于这个问题的讨论, runtime: Large maps cause significant GC pauses #9477
无脑机翻如下:
如果我们有一个map [k] v,其中k和v都不包含指针,并且我们想提高扫描性能,则可以执行以下操作。
将“ allOverflow [] unsafe.Pointer”添加到 hmap 并将所有溢出存储桶存储在其中。 然后将 bmap 标记为noScan。 这将使扫描非常快,因为我们不会扫描任何用户数据。
实际上,它将有些复杂,因为我们需要从allOverflow中删除旧的溢出桶。 而且它还会增加 hmap 的大小,因此也可能需要重新整理数据。
最终官方在 hmap 中增加了 overflow 相关字段完成了上面的优化,这是具体的 commit 地址。
下面看下具体是如何实现的,源码基于 go1.15,src/cmd/compile/internal/gc/reflect.go 中
通过注释可以看出,如果 map 中保存的键值都不包含指针(通过 Haspointers 判断),就使用一个 uintptr 类型代替 bucket 的指针用于溢出桶 overflow 字段,uintptr 类型在 GO 语言中就是个大小可以保存得下指针的整数,不是指针,就相当于实现了 将 bmap 标记为 noScan, GC 的时候就不会遍历完整个 map 了。随着不断的学习,愈发感慨 GO 语言中很多模块设计得太精妙了。
差不多说清楚了,能力有限,有不对的地方欢迎留言讨论,源码位置还是问的群里大佬 _
map 是Go语言中基础的数据结构,在日常的使用中经常被用到。但是它底层是如何实现的呢?
总体来说golang的map是hashmap,是使用数组+链表的形式实现的,使用拉链法消除hash冲突。
golang的map由两种重要的结构,hmap和bmap(下文中都有解释),主要就是hmap中包含一个指向bmap数组的指针,key经过hash函数之后得到一个数,这个数低位用于选择bmap(当作bmap数组指针的下表),高位用于放在bmap的[8]uint8数组中,用于快速试错。然后一个bmap可以指向下一个bmap(拉链)。
Golang中map的底层实现是一个散列表,因此实现map的过程实际上就是实现散表的过程。在这个散列表中,主要出现的结构体有两个,一个叫 hmap (a header for a go map),一个叫 bmap (a bucket for a Go map,通常叫其bucket)。这两种结构的样子分别如下所示:
hmap :
图中有很多字段,但是便于理解map的架构,你只需要关心的只有一个,就是标红的字段: buckets数组 。Golang的map中用于存储的结构是bucket数组。而bucket(即bmap)的结构是怎样的呢?
bucket :
相比于hmap,bucket的结构显得简单一些,标红的字段依然是“核心”,我们使用的map中的key和value就存储在这里。“高位哈希值”数组记录的是当前bucket中key相关的“索引”,稍后会详细叙述。还有一个字段是一个指向扩容后的bucket的指针,使得bucket会形成一个链表结构。例如下图:
由此看出hmap和bucket的关系是这样的:
而bucket又是一个链表,所以,整体的结构应该是这样的:
哈希表的特点是会有一个哈希函数,对你传来的key进行哈希运算,得到唯一的值,一般情况下都是一个数值。Golang的map中也有这么一个哈希函数,也会算出唯一的值,对于这个值的使用,Golang也是很有意思。
Golang把求得的值按照用途一分为二:高位和低位。
如图所示,蓝色为高位,红色为低位。 然后低位用于寻找当前key属于hmap中的哪个bucket,而高位用于寻找bucket中的哪个key。上文中提到:bucket中有个属性字段是“高位哈希值”数组,这里存的就是蓝色的高位值,用来声明当前bucket中有哪些“key”,便于搜索查找。 需要特别指出的一点是:我们map中的key/value值都是存到同一个数组中的。数组中的顺序是这样的:
并不是key0/value0/key1/value1的形式,这样做的好处是:在key和value的长度不同的时候,可 以消除padding(内存对齐)带来的空间浪费 。
现在,我们可以得到Go语言map的整个的结构图了:(hash结果的低位用于选择把KV放在bmap数组中的哪一个bmap中,高位用于key的快速预览,用于快速试错)
map的扩容
当以上的哈希表增长的时候,Go语言会将bucket数组的数量扩充一倍,产生一个新的bucket数组,并将旧数组的数据迁移至新数组。
加载因子
判断扩充的条件,就是哈希表中的加载因子(即loadFactor)。
加载因子是一个阈值,一般表示为:散列包含的元素数 除以 位置总数。是一种“产生冲突机会”和“空间使用”的平衡与折中:加载因子越小,说明空间空置率高,空间使用率小,但是加载因子越大,说明空间利用率上去了,但是“产生冲突机会”高了。
每种哈希表的都会有一个加载因子,数值超过加载因子就会为哈希表扩容。
Golang的map的加载因子的公式是:map长度 / 2^B(这是代表bmap数组的长度,B是取的低位的位数)阈值是6.5。其中B可以理解为已扩容的次数。
当Go的map长度增长到大于加载因子所需的map长度时,Go语言就会将产生一个新的bucket数组,然后把旧的bucket数组移到一个属性字段oldbucket中。注意:并不是立刻把旧的数组中的元素转义到新的bucket当中,而是,只有当访问到具体的某个bucket的时候,会把bucket中的数据转移到新的bucket中。
如下图所示:当扩容的时候,Go的map结构体中,会保存旧的数据,和新生成的数组
上面部分代表旧的有数据的bucket,下面部分代表新生成的新的bucket。蓝色代表存有数据的bucket,橘黄色代表空的bucket。
扩容时map并不会立即把新数据做迁移,而是当访问原来旧bucket的数据的时候,才把旧数据做迁移,如下图:
注意:这里并不会直接删除旧的bucket,而是把原来的引用去掉,利用GC清除内存。
map中数据的删除
如果理解了map的整体结构,那么查找、更新、删除的基本步骤应该都很清楚了。这里不再赘述。
值得注意的是,找到了map中的数据之后,针对key和value分别做如下操作:
1
2
3
4
1、如果``key``是一个指针类型的,则直接将其置为空,等待GC清除;
2、如果是值类型的,则清除相关内存。
3、同理,对``value``做相同的操作。
4、最后把key对应的高位值对应的数组index置为空。